在自主导航过程中,无人机的自主避障被认为是不可或缺的能力。在早期的研究中,避障主要依赖于高成本的激光或雷达。近年来,随着计算机视觉的飞速发展,视觉传感器由于具有重量轻、成本低等优点,越来越多地用于无人机避障。基于视觉的无人机避障很可能成为未来的主流。针对无人机可能面临多重障碍的复杂环境,为了在实际避障过程中以最小的努力避开多个障碍物,提出了一种基于特征点提取和聚类相结合的障碍物检测方法,并分析比较了各种障碍物的实验结果。
该方法分三个步骤进行。第一步是检测特征点,使用不同的特征点检测算法来检测障碍物。第二步是特征点聚类部分,使用机器学习无监督聚类方法对检测到的特征点进行聚类。目的是将同一障碍物的特征点归为同一类别。第三步是凸包检测部分,用于检测同类障碍物的特征点(将障碍物最外围的特征点围成一个凸包),用凸包表示图片中真实障碍物的位置。该方法的流程图如图 1所示。
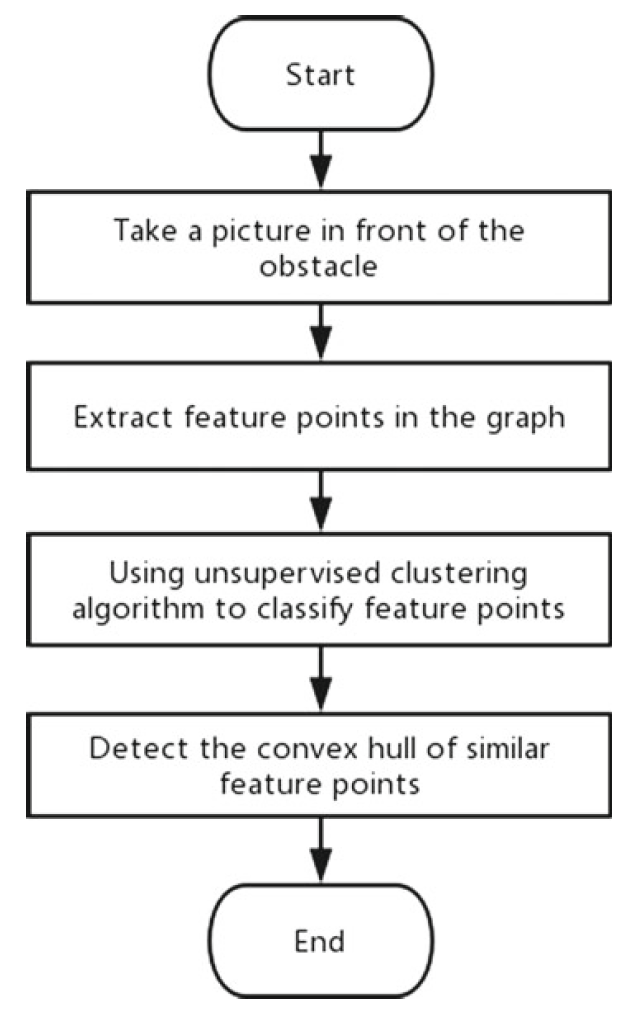
图1 方法流程图
最初,在距离障碍物一米的地方拍照。图片左右两侧各有两个障碍物(这是为了模拟实际避障中可能遇到的复杂避障环境)。我们使用尺度不变特征变换 (SIFT) 特征检测算法、定向FAST和旋转简要 (ORB) 特征检测算法或SURF特征检测算法来检测图中的特征点。如图 2所示,是Speeded Up Robust Features(SURF)特征点检测的效果图。
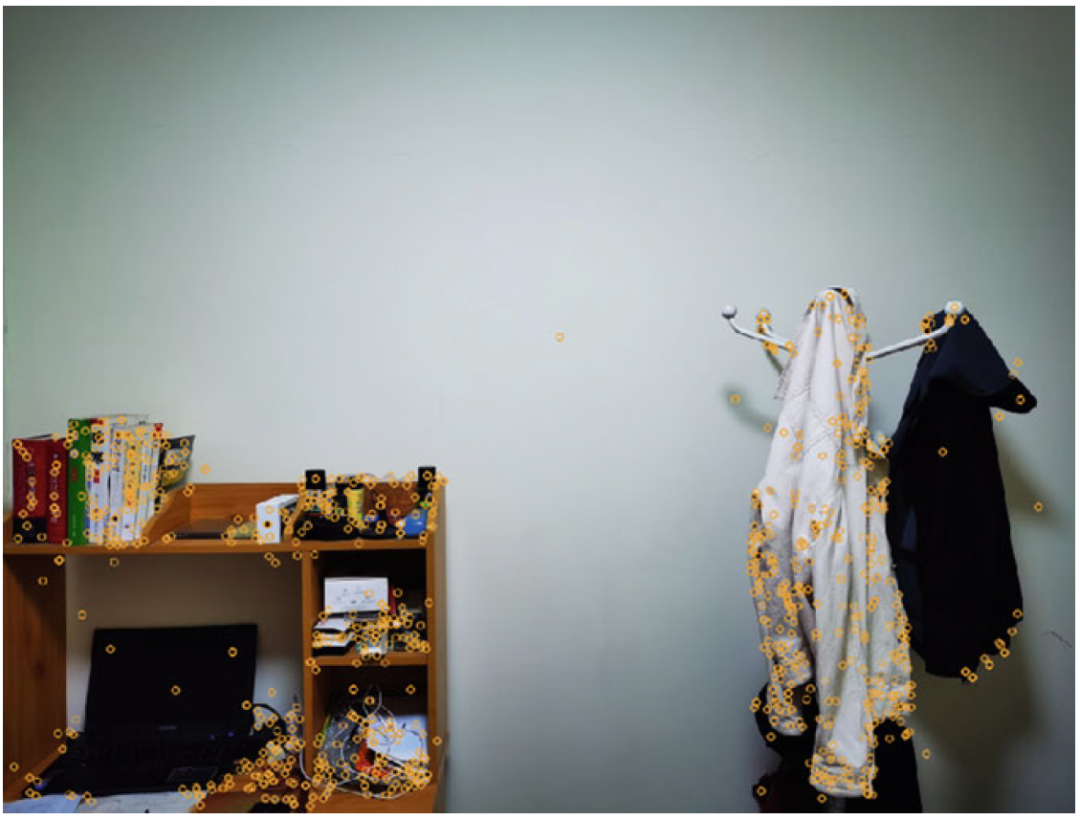
图2 特征点检测
其次,可以采用基于密度的带噪声应用空间聚类(DBSCAN)聚类算法或K-means聚类算法对检测到的特征点进行聚类,以达到将同一障碍物的特征点归为同一类别的目的。如图 3所示,是DBSCAN聚类的效果图,其中相同类型的特征点是一种颜色,两种颜色代表检测到两个障碍物。
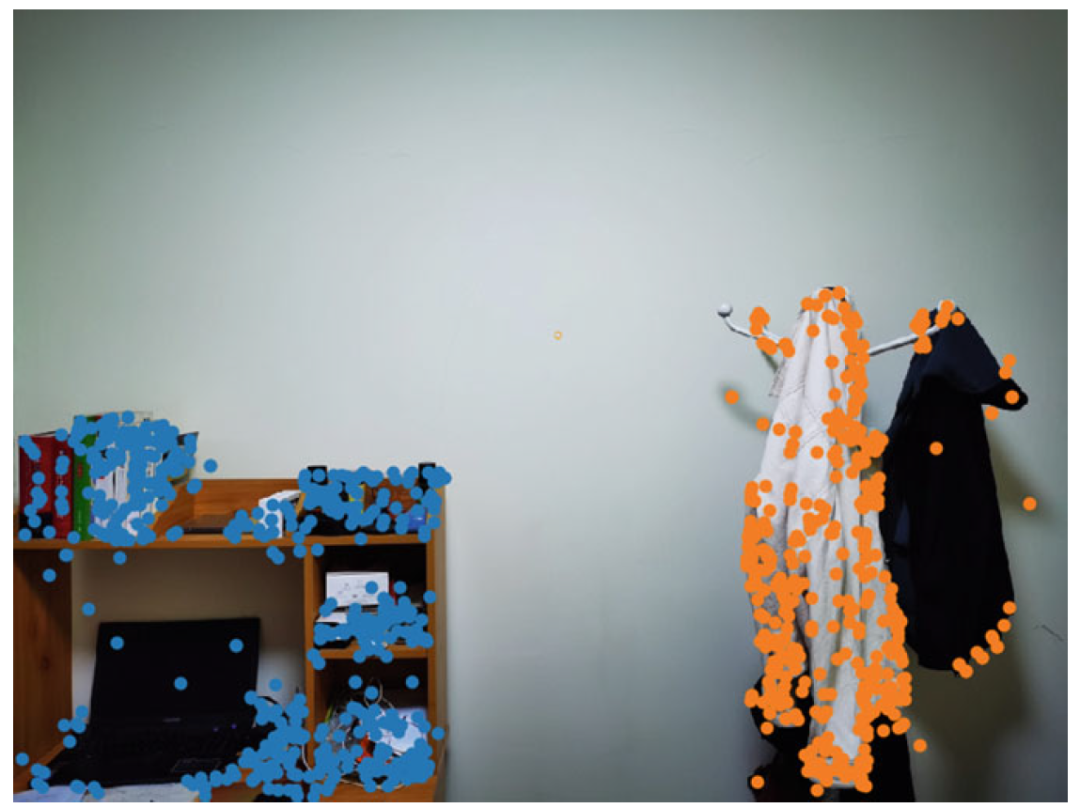
图3特征点的聚类
最终提取出同类特征点的凸包;即凸包被最外层的同类特征点包围。目的是展示空间中不同障碍物的位置和大小关系,为进一步实际避障做准备。如图 4所示,为凸包检测效果图。
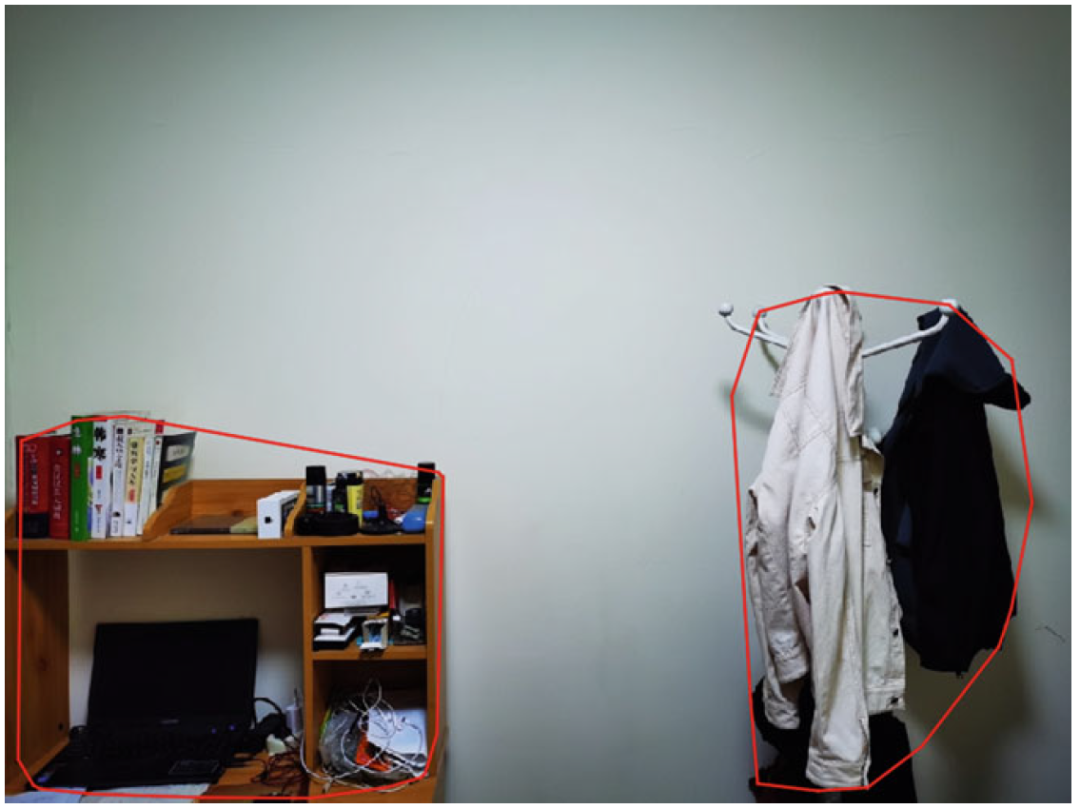
图4 聚类特征点的凸包
在本实验中,使用分辨率为960 * 720像素的图片。这些照片是白天在室内拍摄的。为了展示算法的特点和有效性,我们选择白墙作为背景拍照。实验平台为2.60 GHz Intel i5-4210m处理器。
本实验分为两部分。第一部分是不同特征检测算法和不同机器学习算法组合后检测多个障碍物所花费的时间。检测图片中的障碍物是桌子(左)和衣架(右)。本实验共有六种组合算法,分别是SIFT特征检测算法下的DBSCAN聚类算法和K-means聚类算法,SURF特征检测算法下的DBSCAN聚类算法和K-means聚类算法,以及DBSCAN聚类算法和K-means聚类算法。ORB特征检测算法下的算法。如图 5,比较了不同算法检测障碍物所花费的时间。从图中可以看出,DBSCAN算法比K-means算法花费的时间要少得多,因为它不需要迭代更新过程。并且ORB在K-means算法或DBSCAN算法中比SURF算法和SIFT算法运行时间短,其他检测算法比ORB运行两倍或以上。

图5 组合算法的运行时间
在第二部分中,在无人机和障碍物之间的不同距离下检测凸包中的特征点数量。如图 6所示,是无人机在距离障碍物0.6m、0.9m、1.2m、1.5m处检测到的特征点数绘制的曲线。图中显示,一旦无人机接近障碍物,就会检测到越来越多的障碍物特征点。曲线只是初步实验结果的呈现,它们之间更准确的关系将在以后的工作中进行研究。
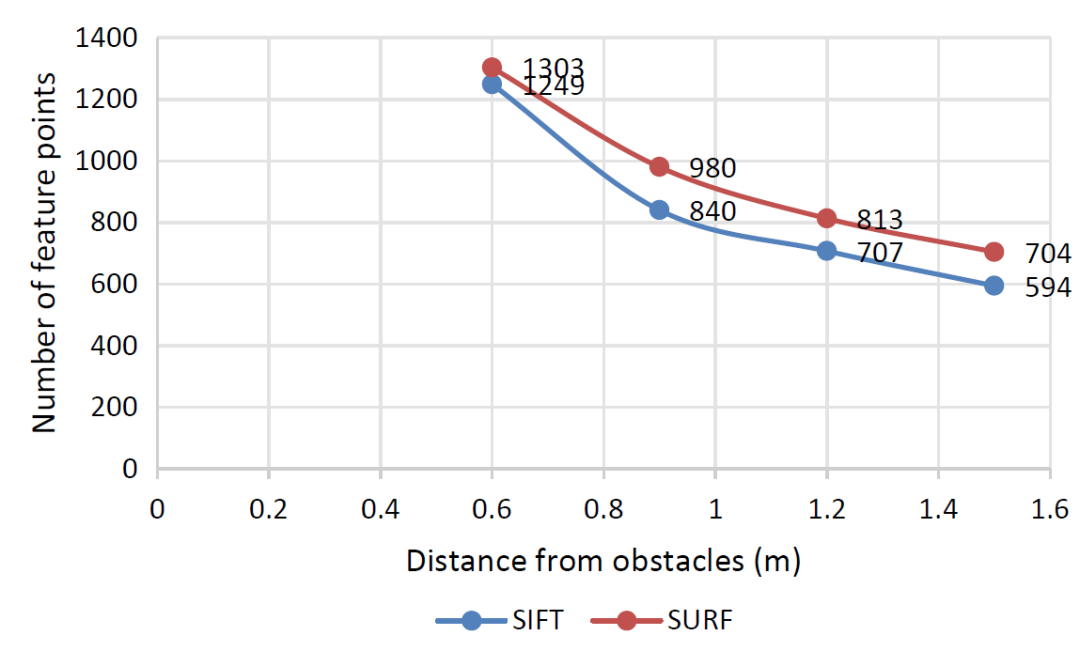
图6 特征点数与距离的关系
通过实验证明了检测多个障碍物的新方法的有效性。实验中使用了6种方法检测障碍物,对比分析了哪种算法实时性更好,初步检测了特征点与距离的关系。















