获得螺旋桨气动性能数据的方法有三个,分别是理论计算、试验测量和CFD计算。
1、理论计算
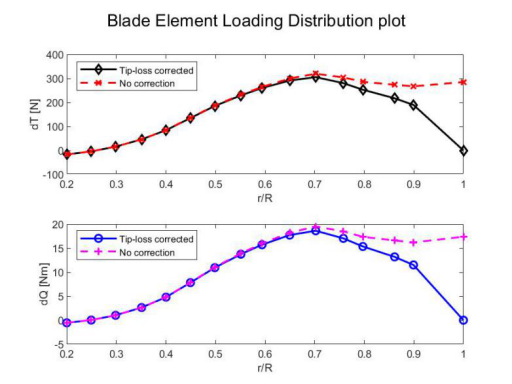
理论计算方法有很多,例如动量理论、叶素理论等等,目前计算最为准确的是片条理论,是在叶素理论的基础上发展而来的。首先求出不同半径位置叶素的气动力,然后沿径向积分得到桨叶的气动力,典型的计算过程如图所示:
2、实验测量
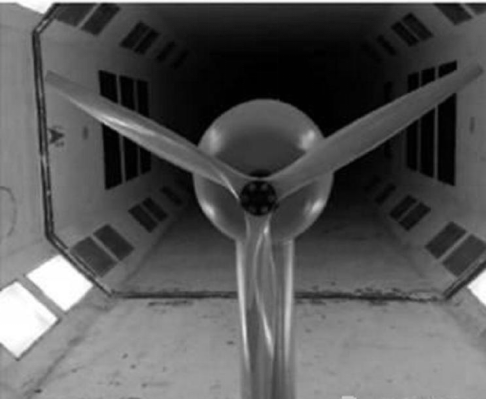
实验测量是在风洞中通过力/矩传感器直接测量螺旋桨不同状态的气动力的方法,实验测试是获得螺旋桨气动性能最准确的方法,但成本较高。
3、CFD计算
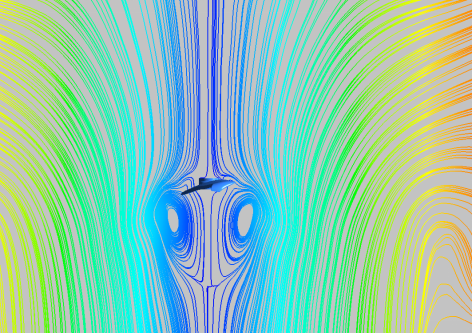
CFD计算也是一种最常用的方法,通过数值仿真计算得到螺旋桨的气动力。CFD计算方法不仅可以得到螺旋桨桨的气动性能,还可以通过流场信息,分析螺旋桨和机体之间的干扰。其计算成本比实验测量低,但精度有待进一步提高。
五、螺旋桨的选型
螺旋桨的选型需要结合飞机气动性能、螺旋桨气动性能以及发动机的负载特性,做到螺旋桨与飞机匹配和螺旋桨与发动机匹配。首先通过几何约束,初步选择一个螺旋桨直径范围,然后选择合适的螺距及桨叶数等参数;其次,根据螺旋桨参数评估螺旋桨的气动性能;最后根据飞机气动性能数据、螺旋桨气动性能数据和发动机负载性能数据评估螺旋桨是否满足设计需求。
1、 螺旋桨和飞机匹配
螺旋桨和飞机匹配是指在给定飞行状态下,螺旋桨能够提供飞机飞行所需的推力。具体过程如下:(1) 由飞机的气动性能确定各个飞行状态的所需推力。(2) 确定所有备选螺旋桨,以及它们的气动性能,包括不同前进比时的拉力系数和功率系数。(3) 利用不同飞行状态的速度确定在该速度时,不同转速时螺旋桨的拉力和功率。(4) 通过发动机或电机最大转速和最大功率确定不同飞行状态的可行域。
对于垂直起降的固定翼无人机,在螺旋桨选型时,可以主要考虑四种飞行状态,分别是巡航、爬升、最大平飞速度飞行和实用升限飞行。四种飞行状态的所需推力可以通过如下公式计算:

其中,W为重力,γ为爬升角,K为升阻比。
通过下表和上述公式可以确定飞机不同飞行状态的所需推力。
| 飞行状态 | 重量 | 高度 | 速度 | 其他要求 | 所需推力 |
| 巡航 | |||||
| 最大速度平飞 | |||||
| 爬升 | 指定爬升率 | ||||
| 实用升限 |
根据飞机总体布局的尺寸限制和成品桨的规格,选择合适的直径范围和螺距范围。然后通过CFD计算或片条理论气动计算程序,以及风洞实验获得所有备选桨叶在不同前进比时的拉力系数和功率系数,再通过拉力系数和功率系数计算出效率。















