
探索ToF 传感器在机器人领域的工作原理、应用和优势。
"ToF" 是 "Time of Flight" 的缩写,中文通常翻译为“飞行时间”。ToF传感器利用光(通常是红外光)发射到目标并测量其反射回来所需的时间来确定对象与传感器之间的距离。这种技术可以为各种应用提供深度信息,例如3D成像、机器人导航、手势识别和增强现实。
机器人的应用环境变得更加复杂和动态,这需要开发更灵活、更先进的视觉和定位功能。在不受控制的环境中运行的机器人的一项基本功能是识别周围环境。实现这一目标的一种解决方案是使用具有聚光和泛光照明选项的飞行时间 (ToF) 成像传感器。
ToF 传感器使机器人应用程序能够对其环境进行成像并创建周围环境的 3D 地图。让机器人知道哪些物体靠近,并获得有关它们的大小、形状和边缘的详细信息。例如,机器人真空吸尘器可以使用此信息来了解它是否可以行驶到沙发或橱柜下方并清洁那里。
本文探讨了 ToF 成像传感器的工作原理、其应用以及对机器人的好处。
ToF 3D图像传感器介绍及工作原理
ToF 是一种主动测量,这意味着 ToF 成像仪旁边的激光源发射调制光,而 ToF 传感器接收场景中物体反射的光。这些应用中通常使用红外 (IR) 光,例如 940nm,因为人类看不见它。目前市场上的 ToF 成像传感器基于两种测量原理:直接 ToF 和间接 ToF。
直接ToF 测量
对于直接 ToF 测量,激光源发射短激光脉冲,ToF 传感器测量发射激光脉冲和反射激光脉冲之间的延迟。脉冲发射和传感器检测之间的时间延迟(飞行时间)被转换为距离测量值,以重建 3D 场景。用于直接 ToF 测量的成像传感器更加复杂,因为需要快速探测器 (SPAD),并且必须计算片上直方图以实现与物体表面相关的必要峰值查找。

直接 ToF 传感器的简单机制
间接ToF 测量
对于间接 ToF 测量,激光源通常为垂直腔表面发射激光器 (VCSEL),发射波长在 850 至 940 nm 之间的调制红外 (IR) 光。VCSEL 优于 LED,因为它们在 80 至 100 MHz 的调制频率下工作时呈现出更好的结果,并且具有窄光谱2。ToF 传感器通过其镜头捕获反射信号,每个像素将发射的调制信号与从场景接收的捕获信号进行比较。快速全局快门 ToF 像素收集与发射信号重叠的光量以及稍后到达的光量。然后根据该信息确定两个信号之间的相移。对于间接 ToF,所谓的相位图像是传感器的输出。根据传感器和应用,使用基于 2、3 和 4 相的方法。间接ToF的优点是不需要片上处理。
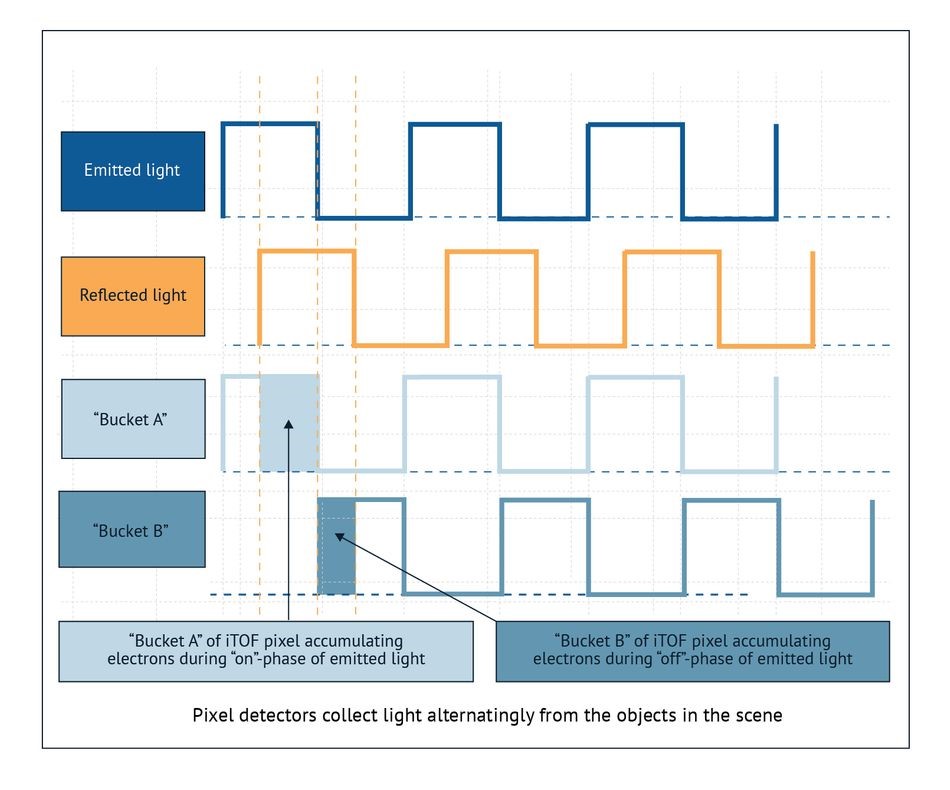
探测器交替收集来自感兴趣物体的光。
ToF传感器输出数据
在这两种测量方法中,测量的数据都会在芯片上转换为数字表示形式,即间接 ToF 的相位图像和直方图,然后找到直接 ToF 的峰值。然后,该表示形式通过 MIPI-CSI-2 或并行 (PIF) 接口作为原始 3D 数据传输到应用处理器 (AP)。通过处理原始数据,AP 提供两个图像:深度图和幅度图像。深度图包含每个像素的深度信息,即该像素处物体与相机之间的距离。幅度图像包含幅度信息,代表物体在该位置的亮度。复杂的系统还可以提供附加图像,例如指示每个像素的质量度量的置信度图像。

飞行时间框图。图片来源:英飞凌
根据应用的不同,ToF 传感器可以与 RGB 图像结合使用。在这种情况下,算法可以组合 RGB 和深度图像,以获得场景及其对象的 3D 表示,其中包含深度和颜色信息。这允许先进的应用功能,例如物体识别,让机器人决定该物体是否是一个不应在驾驶时与周围保持安全距离而触摸的玩具,或者是一个应在附近清洁的柜子。或者通过面部生物识别技术以可靠、安全的方式识别人员。
ToF 传感器的优点
ToF 传感器取代了接触式和接近式传感器,具有高精度,可通过大量可用像素来检测小物体。与接触式传感器相比,ToF 传感器的另一个优点是没有机械移动部件,从而减少了维护需求。特别是对于机器人来说,现有的 LDS(激光距离扫描)传感器体积庞大、价格昂贵,并且具有机械旋转镜。ToF 成像传感器更小、更具成本效益并且不需要机械移动部件。
由于其环境光鲁棒性,ToF 传感器还可以在黑暗和强烈阳光条件下使用。此外,这些传感器具有较宽的距离范围,能够检测 10m 之外的物体。此功能使其可用于室内和室外应用。最后,较小的相机尺寸可以集成到较小的机器人中,例如消费机器人真空吸尘器或无人机。















