大部分进入海洋的人为污染(尤其是塑料污染)都是由河流携带的。事实上,河流网络通过城市住区,垃圾通常被引入河流环境,然后被输送到河口,最终进入海洋,对水生动植物产生了巨大影响。由于减少人为污染对水生环境的影响至关重要,因此已经实施了几种策略,以减少塑料(和不可生物降解)物体的使用,促进回收利用,检测环境中的垃圾,并捕获它。
专注于对水生环境(例如海洋、河流、海滩)的垃圾检测,由于遥感界的努力,近年来已经开发了许多方法来实现这一目标。根据可用的设备(如无人驾驶飞行器(UAV)、卫星图像),在不同的空间尺度上对垃圾的搜索进行了研究。目前无人机上可用的现成传感器的快速概述包括例如RGB,多光谱和热像仪,激光雷达(光探测和测距)和超光谱传感器。
尽管无人机上可以安装如此多的传感器,但考虑到城市地区的河流环境,可用的选择相当少。例如,欧盟最近对民用无人机实施了限制(欧盟条例2019/947和2019/945),特别是在城市地区。此类法规对小型无人机的限制较少,这最近导致民用无人机操作员对小型无人机的兴趣日益增加,例如重量≤250克。出于后者的考虑,这项工作旨在调查在城市环境中使用小型无人机在河岸上进行垃圾检测的可行性。
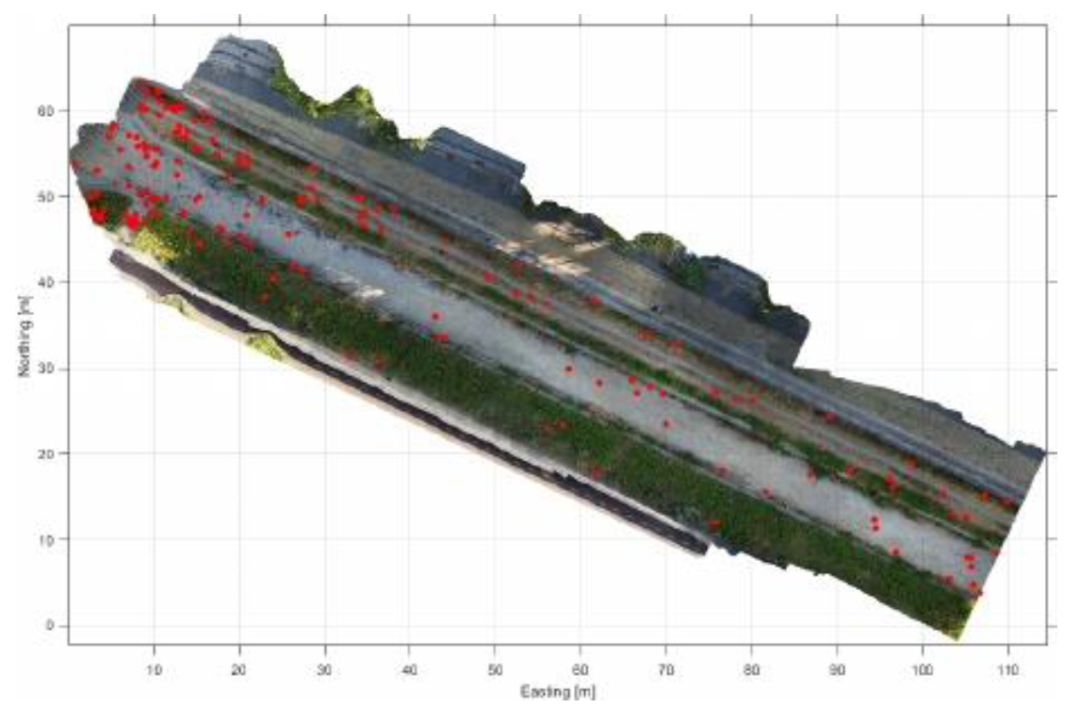
本研究所选择的研究区域被确定为意大利佛罗伦萨穆格内河的一部分。图1显示了考虑区域的一部分(100米长)。
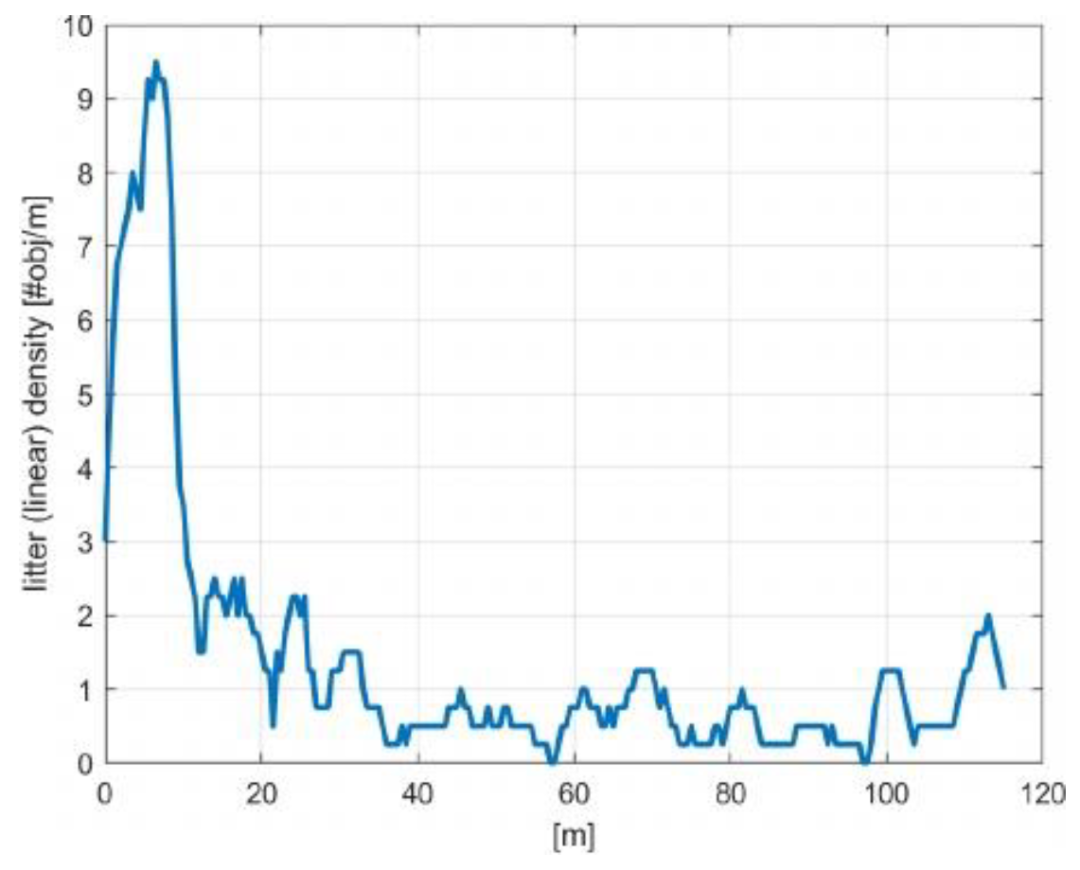
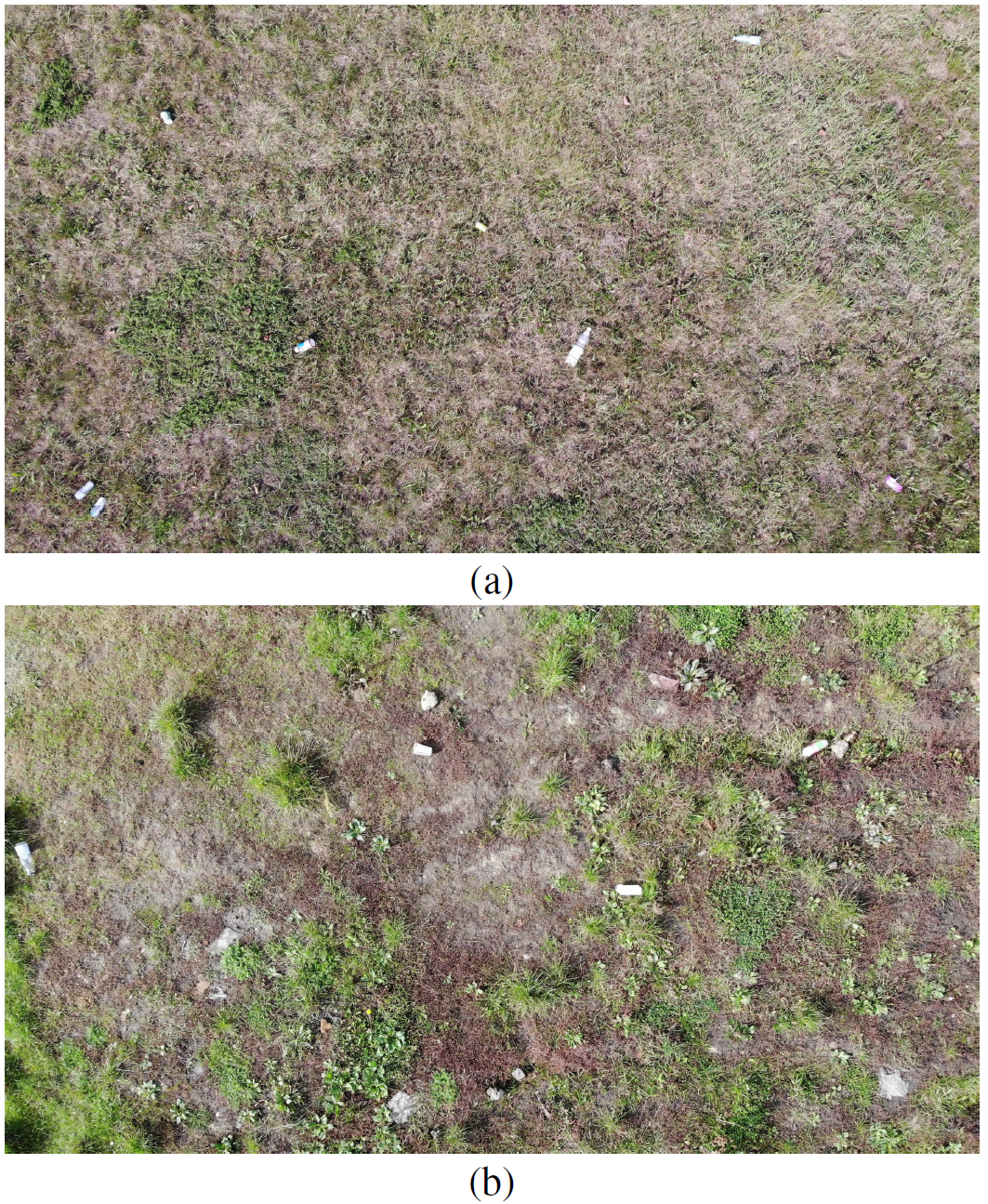
图1研究区内包含的垃圾(红色标记) 在图1所示的区域内,已经确定了150多个垃圾,图中用红色标记表示,其空间密度可变,甚至达到每米9个以上的物体(线性密度,例如在与河流方向正交的截面上),如图2所示。 图2 研究区域沿河道方向垃圾(线性)密度 RGB图像是通过大疆Mini 2无人机获得的,如图3所示,在感兴趣的区域上空以不同的高度飞行。 图3 大疆Mini 2无人机 提出的方法是基于使用深度学习方法从微型无人机RGB图像中检测垃圾。基本原理是微型无人机可以被用来在感兴趣的区域上自动或遥控飞行。然后,获取的图像可以传输到一个计算站,并进行近乎实时的处理。 使用Yolo v4网络实现了快速目标检测:从Yolo v4网络中迁移学习,最初是用COCO(上下文中的公共对象)数据集进行预训练的,使用了来自公共数据库的数百张垃圾图像。图4展示了从这样的公共数据库中获取的几个图像示例。 图4 从训练数据库中获取的图像示例 微型无人机获得的视频帧由一种特别开发的SLAM算法处理。 假设微型无人机摄像机是预先校准的,并且视频帧在输入SLAM算法之前被缩小到大约0.5百万像素,以便使该过程实时可执行。更精确地说,假设无人机图像是用相机在最低点方向获取的,因此,对提出的目前相当标准的视觉ORB-SLAM方法进行了修改,以考虑到这些先验信息。图5显示了垃圾检测的示例,而图6显示了检测错误的假阳性和假阴性示例。 图5 在无人机中实现匈牙利算法的具体过程 图6 检测错误示例:(a)假阳性,(b)假阴性 提出的方法的定位误差很大程度上取决于与正射影像相匹配的点之间的距离,范围从几分米到甚至超过一米。对于任何基于slam的方法来说,这种行为都是相当标准的,如果没有可靠的定位更新,那么评估的位置预计会偏离正确的位置。 综上所述,值得注意的是,垃圾的特征尺寸在分米级别,因此,当与正射影像匹配的点集在感兴趣的区域上分布得相当好时,期望获得的定位误差级别在实际应用中是足够的。 源自:ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume X-4/W1-2022 GeoSpatial Conference 2022 – Joint 6th SMPR and 4th GIResearch Conferences, 19–22 February 2023, Tehran, Iran (virtual)