对于民用基础设施管理,如锅炉内部、风管和管道,频繁检查和故障检测对于预防事故和最大限度地减少经济损失具有重要意义。传统上,这些检查要求操作员在难以接近且有风险的危险环境中工作。此外,这些设施大多具有复杂的配置或较大的表面积,这增加了手动缺陷检测的时间和人工成本。为了节省设施管理的人工成本,减少巡检的时间和风险,提高设施缺陷和故障检测的准确性,越来越多的研究人员倾向于将无人机/地面车辆(UAV/UGV)纳入自动巡检数据收集。特别是近年来,由于无人技术的突破,无人机和UGV正在逐渐取代人工巡检。
在室内应用中,没有GPS信号。为了实现自主飞行,需要定位系统为无人机提供位置信息。通常,UWB和VICON用于提供位置信息。但是,这些都是外部定位设备,很难在新环境中部署这些设备。为了获得高质量的图像,拍摄点与设施之间的距离应满足检查要求。然而,飞行安全需要保证,在确保飞行路径没有障碍物的同时获得最短路径并不容易。此外,在障碍物密集的室内环境中,生成动态可行的轨迹以遵循路径可能具有挑战性。它对无人机灵活调整主路径以避开障碍物同时满足动态限制提出了很高的要求。针对上述难点,提出一种基于无人机的高效探索后利用系统,可用于室内数据采集。该系统保证了目标设施的覆盖范围,无人机与障碍物之间的防撞以及飞行安全。
图1显示了所提出的先探索后利用系统的架构。受保护的无人机用于探索未知环境,并构建可用于开发步骤的3D地图和关键帧图。小型轻型无人机用于对目标区域进行覆盖路径规划,并按照生成的轨迹获取有关设施的详细信息。
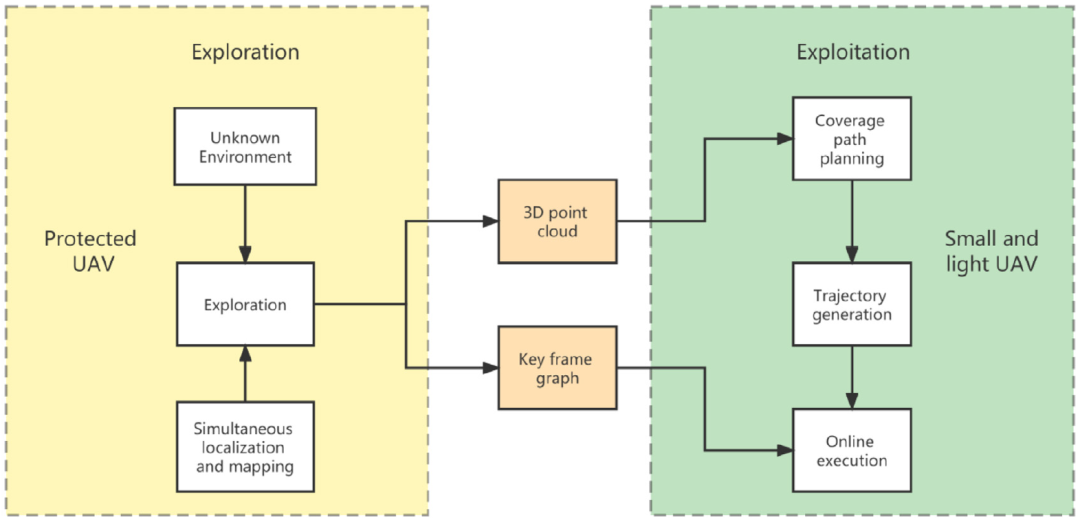
图1 先探索后利用系统的整体框架
如图2所示,所提出的系统由两架功能不同的无人机组成。因为环境未知,最大的挑战是保证飞行安全。因此,我们参考Petris等人设计了一种受保护的无人机。选择3D激光雷达作为激光SLAM的设备,以实现在未知环境中的鲁棒定位和映射。立体相机用于构建开发步骤的关键帧图。

图2 硬件设计和架构集成了两架设计的无人机
对于开发步骤,设计了一种小型轻型无人机,因为续航时间需要更长才能在一次飞行中获得更多图像。立体相机和关键帧图用于在飞行过程中提供定位信息。DJI ACTION2是一款4K光学相机,用于收集目标设施的详细特征。在探索步骤中,使用 Velodyne 16 执行基于激光雷达的SLAM,使用VINS英特尔实感D435i的图像构建关键帧图,使用NVIDIA Jetson Xavier NX在线计算SLAM算法。考虑到室内环境的特殊性、现有的SLAM技术和无人机的有效载荷,我们在探索步骤中选择Fast-LIO2 作为无人机基于激光雷达的SLAM。在开发步骤中,实施VINS-MONO以提供无人机的姿态估计。我们利用这两个框架,并将它们组合在一起,为每架无人机提供强大的姿态估计。所提出的SLAM方法的框架如图3所示。
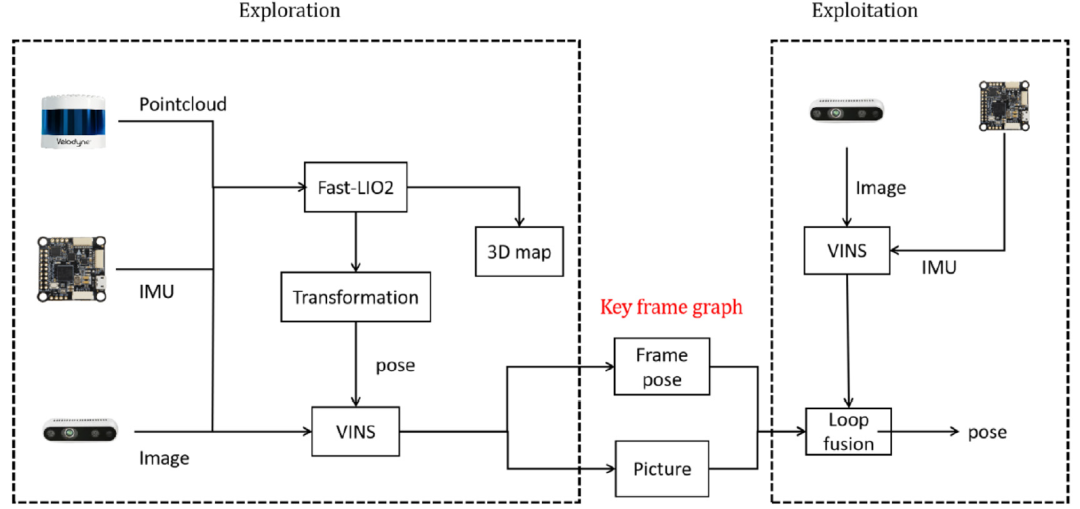
图3 SLAM 系统的框架
然而,如图4所示,VINS和Fast-LIO2的坐标框架不一致。因此,需要将Fast-LIO2坐标中的测程转换为VINS坐标,以确保保存在关键帧中的姿势准确无误。在开发的步骤中,仅仅依靠视觉惯性里程计是不够的。因此,来自VINS的局部姿态和来自关键帧图的全局姿态在循环融合中组合在一起。当无人机遇到类似场景时,进行搜索和图像匹配,得到无人机的全局姿态,从局部估计中修正漂移。环路融合后,无人机可以得到精确的姿态估计,漂移很小。

图4 立体相机和激光雷达的坐标系
在内部收集数据时,确保目标设施覆盖范围和飞行安全具有挑战性。为了解决这个问题,我们提出了一种安全保证的覆盖路径规划算法,其中包括视点生成和路径生成。所提方法的整体框架如图5所示。
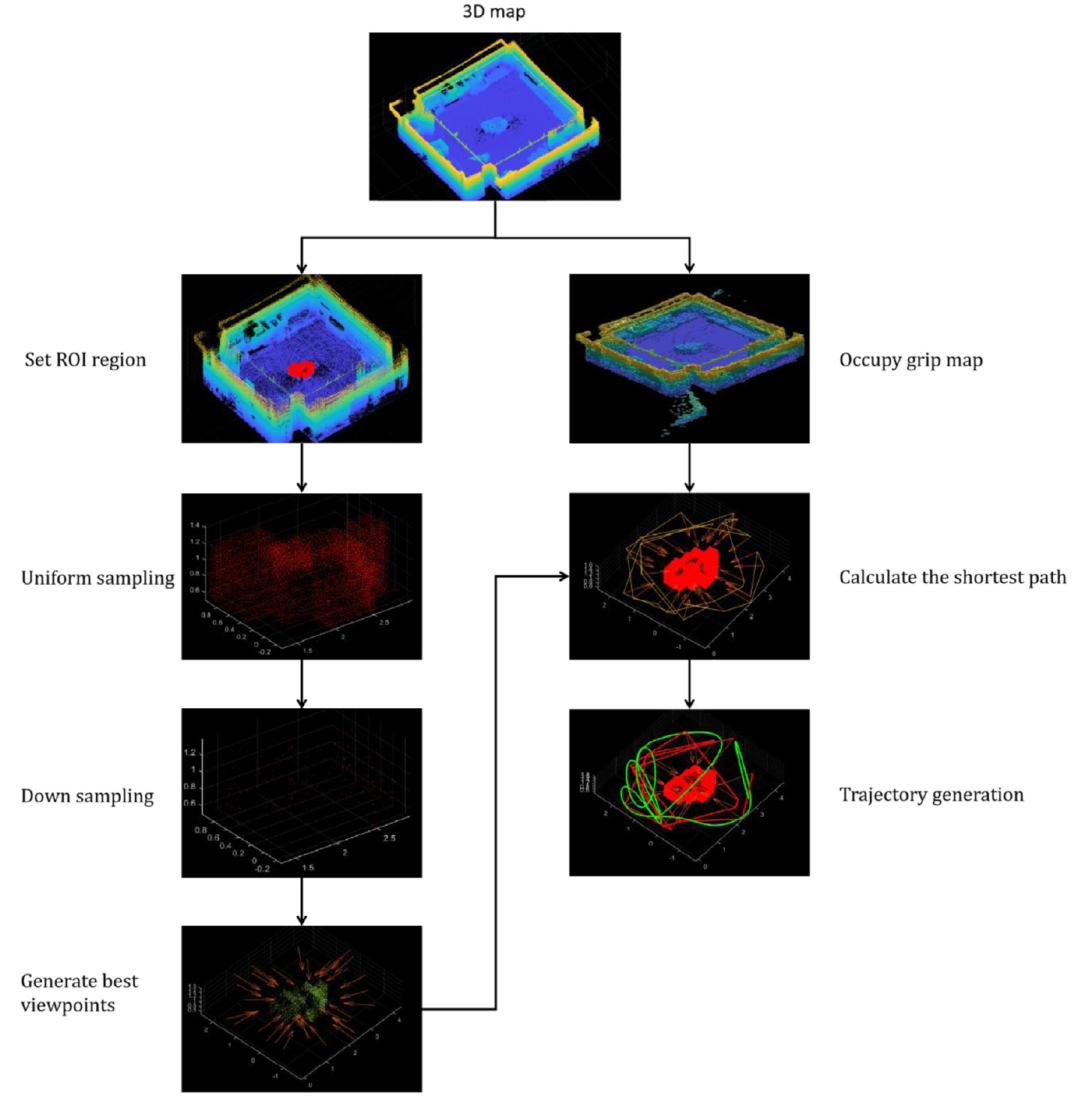
图5 视点生成的整个算法过程
为了详细说明所提出的探索后利用系统,我们在没有外部定位设备的室内环境中进行了几次现场实验。分别测试了所提SLAM系统的精度和稳定性、所提轨迹生成方法的鲁棒性以及整个系统的性能。实验在8.4米长,6.0米宽,6.0米高的环境中进行。图6显示了实验室环境的详细信息,激光雷达SLAM的3D地图,生成的轨迹,工作场景以及重建结果的整体和详细特征。

图6 实验环境、设置、过程和结果
如图7所示,我们分别使用无人驾驶车辆和携带3D激光雷达Velodyne 12的无人机对室内场景进行建模。如右图所示,UGV构建的地图上仅显示底部环境信息。相比之下,无人机构建的地图是完整的3D地图,其中包含有关设施和障碍物所有必要信息。

图7 分别由无人机和UGV构建的3D地图。左图由无人机构建。右图由UGV构建
如图8所示,我们在设施上放置了一些标记并测量每个标记之间的距离。最后,我们得到 45 个测量距离,并将它们与重建模型中的相应距离进行比较。

图8目标设施点的标记和测量距离
以锅炉检查为例,通常检查锅炉内部需要两个人和一天的时间,但使用我们的系统,只需要一个小时和一个工作人员即可完成整个检查任务。借助厘米级的SLAM系统,无人机可以在小至0.8米宽的狭窄空间内飞行,并在任何位置和角度收集数据,这意味着我们的系统也可以广泛应用于室内场景。与FARO等精度和分辨率更高的三维扫描设备相比,无人机更加灵活,无需人工协助即可移动到任何位置并构建整个环境的完整三维地图。此外,在室内环境中部署 FARO 非常昂贵。当风道和锅炉内部等人类难以进入的工作区域时,无人机是探索阶段的不错选择。
源自:Automation in Construction 148 (2023) 104753
https://doi.org/10.1016/j.autcon.2023.104753















