近期,我们在FMT固定翼平台进行了目标搜寻和目标投掷实验,从实验结果来看,FMT固定翼的自稳、定高、定点、航点及返航功能均满足预期,最终成功完成了此次实验,下面我们通过视频一起来了解本次实验的情况。
从视频中大家可以看到,FMT固定翼能够按照既定路线飞行,通过 Mini Homer图数传链路实现图像传输,从而在地面站看到数字标靶位置,对1、2号数字执行搜寻任务,对3、4号数字先执行搜寻任务,再通过手动操作执行抛投任务。实验中最关键的环节便是航点功能,下面我们就详细介绍一下FMT的航点功能具体是如何实现的。
FMT固定翼航点飞行功能主要在FMS(飞行管理系统)中实现,其算法模型主要包含两个部分,分别为状态机(FMS State Machine)和指令生成器(FMS Commander)。
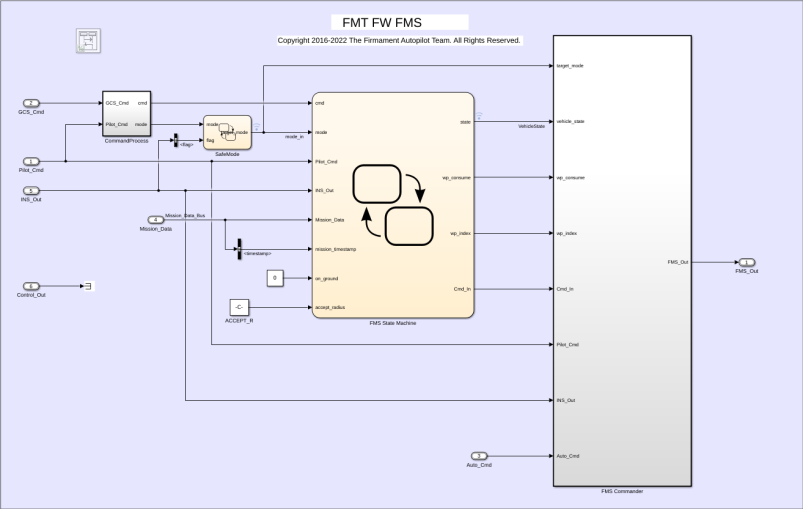
其中状态机主要负责模式的切换逻辑。与航点相关的模式包括 Mission 模式、Takeoff 模式、Return 模式和 Hold 模式等。Mission 模式主要负责处理输入 FMS 的航点数据 Mission_Data ,并依次将各航点数据解析发送给 Commander 进行控制。Mission 模式的状态机逻辑如下所示:
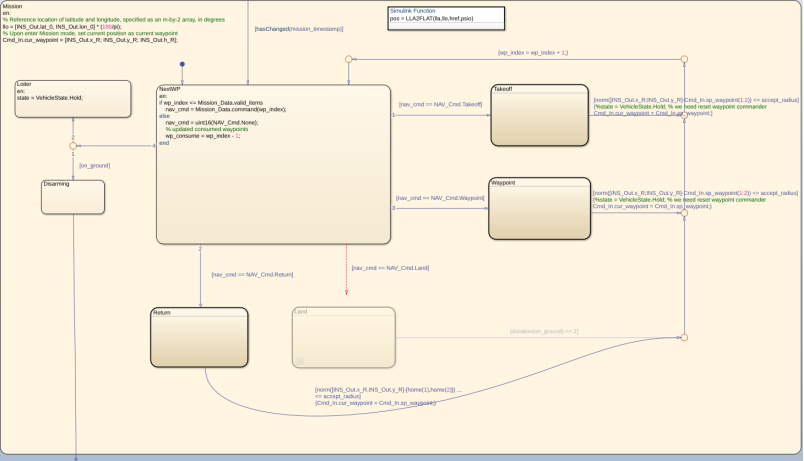
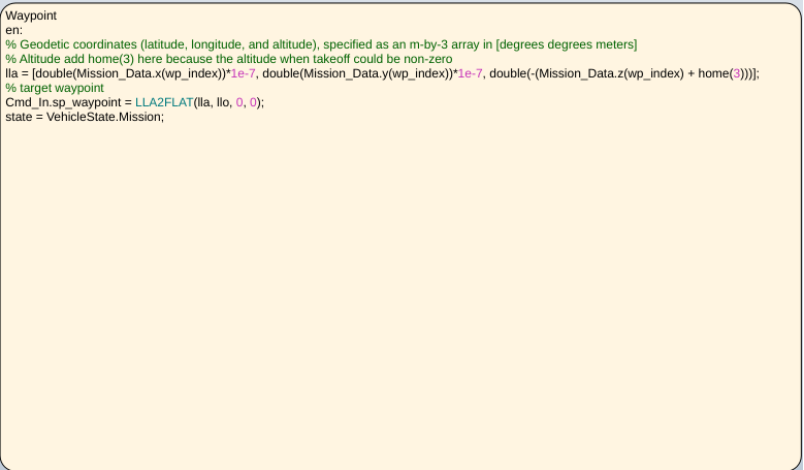
在 NextWP 状态下取出下一个航点数据,这里的航点数据可以是 Takeoff 航点、Return 航点或者普通的 Waypoint 航点(Land 航点暂未支持)均可。根据航点的类型进入到对应的状态中,比如 Waypoint 状态。然后由对应的状态对原始的航点数据进行解析,并生成目标航点数据 Cmd_In.sp_waypoint 。下图为 Waypoint 状态生成目标航点数据:
状态机生成了目标航点数据后,再由 Commander 负责执行,生成 Controller 的控制信号。
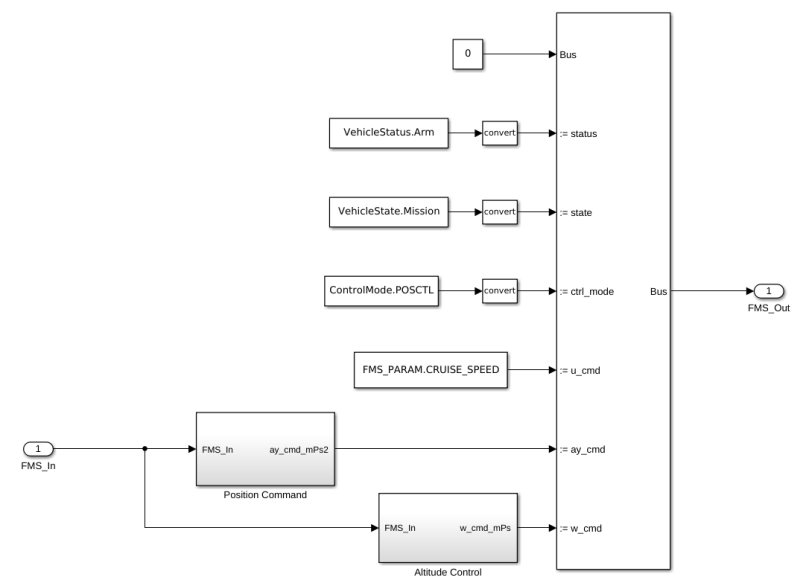
这里巡航速度 u_cmd 通过 FMS 的参数设置,例如默认为13m/s,用户可以通过调节参数来修改固定翼的巡航速度。位置控制产生 y 方向的加速度信号 ay_cmd ,来控制固定翼的横滚角,从而改变固定翼的飞行轨迹及航向角。而高度控制则是生成高度方向的速度 w_cmd 来控制飞机的高度。
我们再来看一下 Position Command 位置控制,其内部框图如下所示:
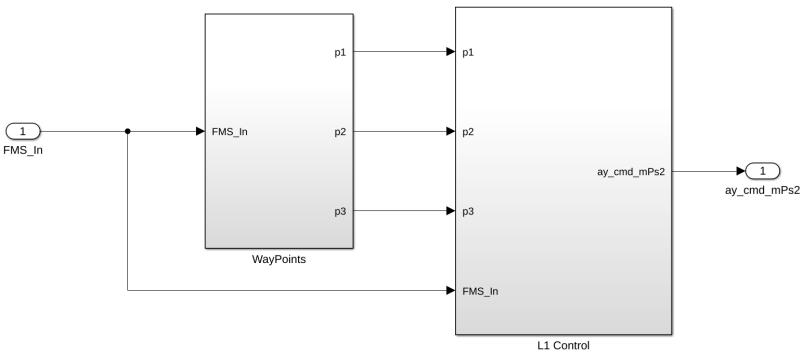
其中 WayPoint 负责选出三个航点数据P1(当前航点)、P2(目标航点)和P3(飞机的位置)。然后通过 L1 算法输出 y 方向的加速度指令 ay_cmd_mPs2 。
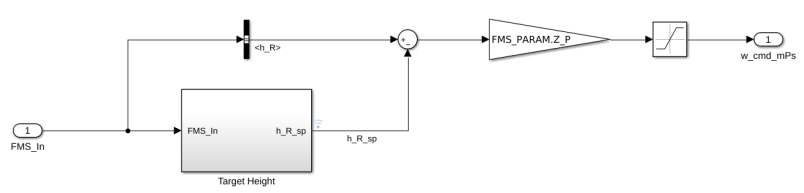
高度控制器的算法比较简单,就是一个 P 控制器,由高度误差输出高度方向的速度指令 w_cmd 。
通过此次实验可以看出FMT固定翼飞控系统已经比较成熟,各种任务及动作均能稳定执行。目前FMT国产开源飞控系统已经支持了四旋翼和固定翼,感兴趣的朋友可以访问FMT项目地址或查看阿木实验室官网课程进行学习。
也欢迎对FMT感兴趣的开发者加入开源生态,为国产开源飞控系统添砖加瓦。















