引言:
随着无人机作业自主性、智能化、多任务等方面要求的提高,无人机从单机作业发展到集群作业,对多机集群通信技术提出了更高的要求。采用多架无人机协同方式,无人机之间通过通讯,进行信息共享,扩大对环境态势的感知,实现协同任务分配、协同搜索、协同侦察与攻击,能有效提高无人机集群的生存能力和整体作战效能。

国内外发展现状
国外发展现状
“蝗虫”(LOCUST)项目
2015年4月16日,美国海军研究办公室公布了低成本无人机集群技术(Low-cost UAV Swarming Technology,LOCUST)项目进行的一系列无人机集群技术验证工作。LOCUST项目聚焦于发展通过发射管将大量可进行数据共享、自主协同的无人机快速连续发射至空中的技术。美国海军研究办公室于2015年3月在多个地点完成演示验证工作,其中包括发射可携带不同任务载荷的郊狼(Coyote)无人机,并完成了9架无人机完全自主同步和编队飞行的技术验证。现该项目已应用到实际作战中,并在俄乌战争中大规模使用。

LOCUST项目自主集群飞行技术具有三个显著特点:
① 去中心化,降低系统破坏敏感性
蜂群中的个体均未处于中心控制地位,在单一平台性能受损后仍可有序协同执行任务。
② 自主化,人员可随时干预
飞行个体之间具备位置共享及路径规划、感知规避能力,蜂群根据设定自主飞行,将指挥员从繁重的作战任务中解放出来,必要时人员又可随时干预。
③ 自治化,保持集群结构稳定
无人机自然形成一个稳定的集群结构,一旦有任何单个平台因丧失功能脱离群体,新的集群结构排列会快速自动形成并保持稳定。
国内发展现状
2017年10日,中国电子科技集团公司完成119架固定翼无人机集群飞行试验,刷新此前2016年珠海航展披露的67架固定翼无人机集群试验纪录,标志着智能无人集群领域的又一突破。试验中,采用自组网数据链,119架小型固定翼无人机成功演示了密集弹射起飞、空中集结、多目标分组、编队合围、集群行动等动作。

飞思实验室无人机集群应用
飞思实验室针对大规模无人机集群应用推出集中式控制和分布式控制两种集群方案。针对客户不同需求和不同应用场景,选择不同的集群控制方式。
集中式控制
飞思实验室集中式控制无人机集群方案采用飞思实验室自研的点对多点高带宽数据链,针对不同的载荷和应用场景实现最大30架无人机控制。在集中式控制体系中,由地面控制站中的操作人员制定任务分配方案和无人机具体飞行航路,无人机本身不具备决策能力,完全按照地面控制站发出的任务指令和航路执行任务。其优点是整系统构成简单成本低、分配算法实现简单且具备产生全局最优解的潜力。系统拓扑如图:
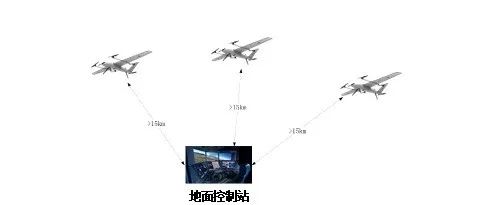
无人机的飞行控制信息、吊舱等负载信息通过数据链回传到地面控制站,地面控制站同时可对所有无人机进行实时控制和任务分配。无人机相互之间不进行数据交换,所有数据下发到地面控制站后完成数据处理。
分布式控制
飞思实验室分布式控制无人机集群方案采用飞思实验室自研的自组网高带宽数据链,针对客户对不同的载荷和应用场景下的带宽需求,实现最大30架无人机控制。分布式控制体系中无人机集群中的无人机是具有独自决策能力的智能体,它们具有很强的协同能力和自治性。无人机之间以自研的自组网高带宽数据链技术为支撑,无人机之间对所处环境、任务目标集信息、无人机状态信息进行交互,综合考虑各种因素,提出具体的解决任务分配问题的方案和具体步骤,实现协同任务分配、协同搜索、协同侦察与攻击。无人机个体在分布式控制体系下具有较强的实时性、抗干扰能力、计算量小、计算复杂度小等优点,其主要适用于动态环境,中等至大规模系统中。系统拓扑如下图:
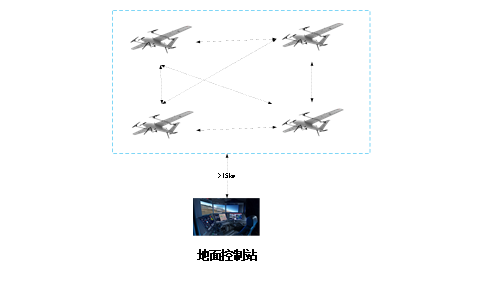
分布式控制无人机集群方案各无人机搭载自研的自组网高带宽数据链和高性能机载板卡,可实现各机之间相互通信,任意组网,可实现星型、网状、链式等多种组网方式,实现去中心化组网,各机均可和地面控制站通信,飞行个体之间具备位置共享及路径规划、感知规避能力,且任何一架无人机脱离集群,剩余无人机可快速形成新的稳定的集群网络,系统抗毁伤能力强。机载板卡可实现无人机间信息交互处理、目标识别、航迹自主规划、任务协同分配,最终实现无人机集群协同任务分配、协同搜索、协同侦察与攻击。
集群无人机
飞思实验室针对大规模无人机集群应用客户不同需求和不同应用场景,特别研发了多旋翼和垂直起降固定翼两种集群无人机。无人机性能优秀,飞行稳定,使用简单,一键起降。主要应用于协同编队、自主侦察探测、自主目标识别标定、自主任务协同、slam导航、视觉跟随、目标识别、人工智能应用等领域。
四旋翼无人机TS-X4

| 项目 | 规格参数 |
| 四旋翼无人机 | |
| 对角轴距 | ≤900mm |
| ★空机重量 | ≤3.0kg(不含电池) |
| ★最大载荷能力 | ≥3.0kg |
| 最大起飞重量 | ≤9.0kg |
| ★最大滞空时间 | 自由飞行:≥80min@空载 ★最大滞空时间 ≥55min@1.5kg 载荷 ≥40min@3kg 载荷 |
| 定位导航 | 支持北斗/GPS/Galileo/GLONASS |
| 定位模式 | 支持单点、基站RTK、网络 RTK 等定位模 定位模式 |
| 定位精度 | 水平±0.1m,垂直±0.1m(RTK 定位) |
| 最大上升速度 | ≥5m/s |
| 最大下降速度 | ≥2m/s |
| 最大可承受风速 | ≥12m/s(6 级风) |
| 最大飞行海拔 | ≥5000m |
| 防雨性能 | 中雨(6mm/h) |
| 飞控功能 | 支持手动飞行、一键起降、一键返航、智能跟随、航向锁定、自主航线飞行 |
| ★安全保护 | 持低电量自动返航降落、链路失联超时 返航降落、系留供电失效后自动启用备电 降落 |
| 图数一体数据链 | 传输频率:2.4GHz 最大控制距离:10km(通视、无干扰) 图传分辨率:720P/1080P |
| 工作环境温度 | -20~55℃ |
FVTOL-2400垂直起降无人机

材质性能:复合材料(机身)+碳纤维(舱内加固)+EPO(机翼、机尾)
| 翼展 | 2.4m |
| 起飞重量 | 10~11kg |
| 最大载重 | 2kg |
| 空载航时 | 1.5h~3.5h |
| 空载航程 | 120km~230km |
| 最大抗风 | 6级 |
| 巡航速度 | 72km/h |
总结
随着无人机、人工智能、边缘计算、组网通信等技术的推进,以及机载硬件水平的显著提升,无人机集群受到以中美为首的军事强国高度关注和大力发展。无人机集群也被认为能够颠覆未来战场形势的一种作战手段,俄乌战争中无人机的应用恰恰体现了这一点。因此飞思实验室针对大规模无人机集群应用推出集中式控制和分布式控制两种集群方案。具有智能化程度高、越障能力强、机动灵活、成本低等特点,可实现自主侦察探测、自主目标识别标定、自主任务协同等,形成非对称武器装备,具有极大应用价值。















