推动无人机使用的最重要理念之一是物联网(IoT) 的概念。它符合国际电信联盟 (ITU) 对IoT的定义:随时随地为任何人连接任何东西。提供具有物联网功能的无人机的技术今天已经存在。组合技术旨在对长时间捕获的时空数据进行近乎实时的分析。随着越来越多的网络设备和几种无处不在的技术融合在一起,挑战也越来越大。其中一些包括安全性、服务质量 (QoS) 和不同层的协议开发。为了识别这些问题,已经开发了一些模拟器和仿真器 。一个好的无人机模拟器需要以下特性:易于使用,应该在通用硬件上运行,不太复杂,并且易于GUI 。以下提供了对良好无人机模拟器的一些重要要求的详细描述:
飞行动力学模型
飞机的翼型能够为飞行产生足够的升力。这些飞机是由用户控制的,无论是通过机载自动驾驶仪还是远程计算机。
系统模型
无人机模拟器的可信度依赖于无人机系统的精确数学模型。开发的模型要么基于对整个系统物理特性的理解,要么源自从无人机获得的可靠真实数据。
图形模型
飞机平视显示器 (HUD) 是计算机图形研究的一个专门子集和领域。大多数情况下,显示是在笛卡尔坐标系上考虑的,其中x轴是水平的,y轴是垂直的。有时,基于横向或纵向显示模式的约定存在差异。此类约定通常在图形库中定义,允许用户开发不受任何硬件限制的图形软件,如图所示图1。

图1 图形管道
控制系统
飞行模拟器将控制系统视为数学传递函数,因此模拟器设计者必须以算法形式结合传递函数,以确保系统的I/O关系被正确建模。
飞行路线识别
飞机上的导航系统使用户能够定位当前和未来的位置。各种其他子系统与导航系统一起工作,以实现飞行路线识别、防撞、路径规划和空中走廊分配等功能。
无人机类型和型号
一个好的模拟器还应该支持各种无人机类型和型号。尽管对无人机进行分类没有特定的标准,但一些专家根据大小、范围和配置等参数对其进行分类。
特定于应用程序的要求
无人机模拟器可能还有其他特定于应用程序的要求。一个好的UAVNet模拟器可能需要增强无人机的通信方面,其中每个UAV都被视为网络中的一个节点,并使用 UAVNet特定的网络协议建立通信。
无人机的正确空气动力学设计对于所有不同的形状、尺寸和配置都至关重要,否则可能会导致坠机。因此,有必要在模拟器中对其进行正确建模。此外,从头开始构建模拟器已不再重要,因为研究人员可以从现有的多个游戏引擎、开源 (O/S) 网络模拟器和商业模拟器中进行选择开发他们的解决方案。
Simbeeotic
MAV Swarm Experiments (Simbeeotic) 的模拟器和测试平台是哈佛大学研究人员设计的O/S模拟器,是RoboBees项目的一部分。如图2所示,模型层包含一个接口,用于实现与目标域相关的特征。用户还可以使用可能与模拟、组件引擎或使用调度事件的模型交互的附加组件来扩充模拟器。

图2 Simbeeotic架构
AVENS
Aerial Vehicle Network Simulator (AVENS) 是一种基于混合软件的模拟器,它融合了X-Plane和OMNeT++与LARISSA(UAS 中系统互连的分层架构模型)。许多网络协议是为通信而开发的。AVENS利用X-Plane控制飞行,利用OMNeT++测量吞吐量和丢包等参数。两个模拟器通过XML文件交换信息。在模拟完成之前,会不断交换信息。详细信息交换如图3所示 。
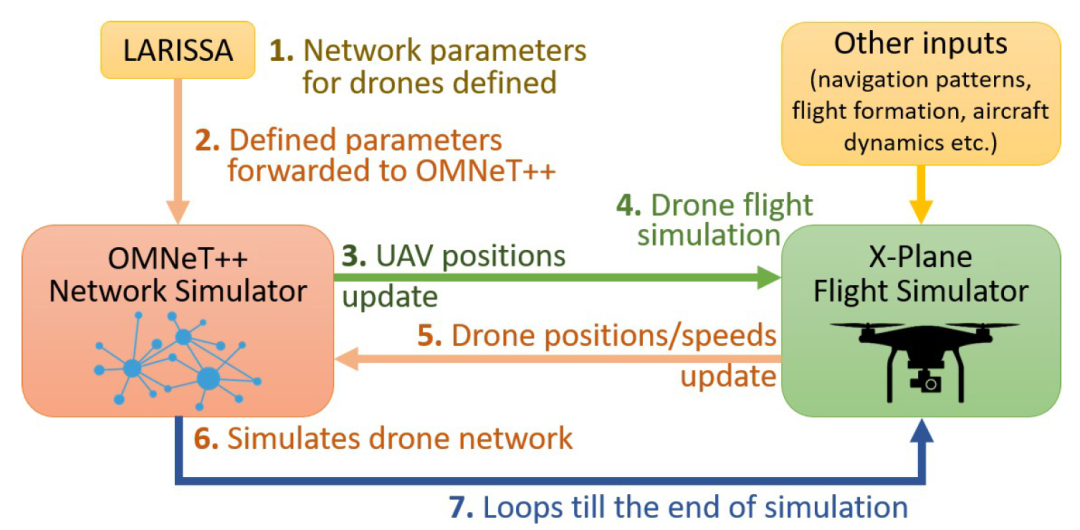
图3 AVENS模拟器
AirSim
AirSim是由微软航空信息学和机器人技术 (AIR) 设计的O/S 无人机模拟器,主要是为了将其作为人工智能研究的有用工具,专注于各种自主无人机的深度学习、计算机视觉和强化学习算法。环境模型、车辆模型、物理引擎、传感器模型、API层、渲染接口和接口层构成了AirSim的核心组件,如图4所示. 一般来说,自主飞行器包含PX4、ROSFlight、Hackflight等飞控固件。

图4 AirSim架构
UAVSim
UAVSim是由托莱多大学的研究人员设计的基于OMNeT++ 的测试平台。其用户友好的GUI允许用户通过调整不同的参数(例如主机和攻击者的数量、明确定义的移动性和无线电传播模型)轻松模拟无人机网络。可以设置配置以使这些模拟类似于真实世界的场景。它有一个针对不同攻击、无人机模型的单独模块,以及一个用于结果和分析的模块(图5)。

图5 UAVSim 模块
DIMAV
受蜻蜓启发的微型飞行器 (DIMAV) 飞行模拟器 [77]旨在分析 DIMAV 在三种不同情况下的性能,即飞行(滑翔或向前飞行)、悬停和机动。图6概述了 DIMAV 飞行模拟器架构。任务配置文件是用户定义的,而自动驾驶模块模拟飞机的自动驾驶功能。

图6 DIMAV飞行模拟器
D-MUNS
分布式多UAVNet模拟器D-MUNS项目是使用现有模拟器提出的。D-MUNS包括三个组件:UAV Simulator Controller、Network Simulator Controller和Monitor,如图7所示。研究表明,应用D-MUNS可以有效减少仿真时间和工作量。
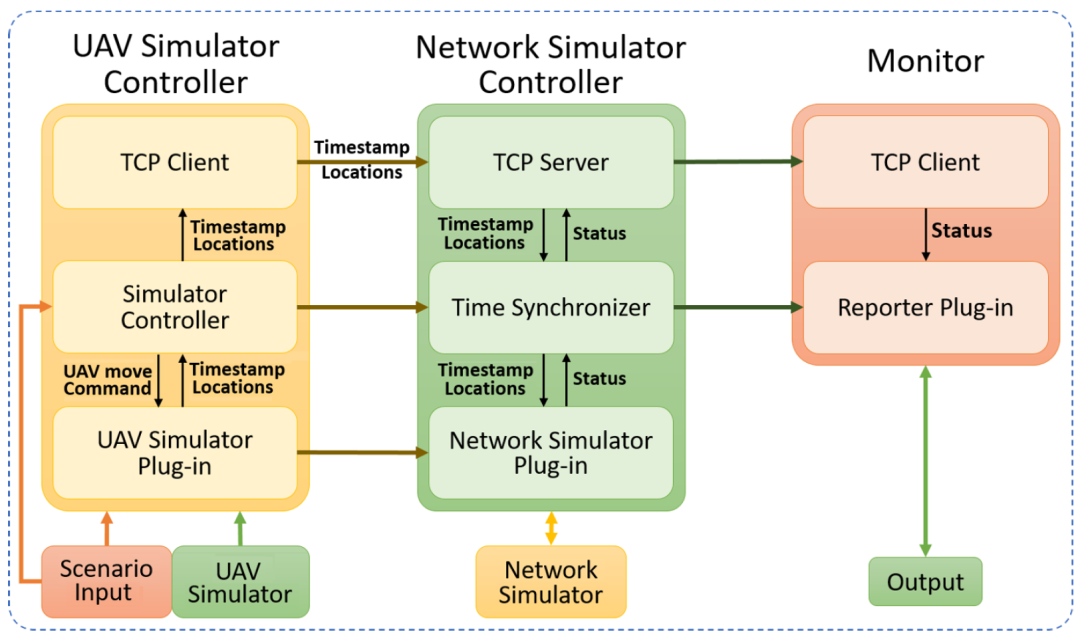
图7 D-MUNS 模拟器
大多数可用的无人机模拟器都用于单架无人机的训练、设计和空气动力学。因此,开发人员通过包含多个无人机模型、生成准确的数学和空气动力学模型以及创建逼真的环境,将他们的专业知识投入到使模拟器多样化。因此,一个更逼真的无人机模拟器需要像任何现有的无人机训练模拟器一样的美学,同时关注UAVNet的网络功能。此类产品在学术、娱乐、研究和设计工程等各个领域都有前景。
源自:Simulation Modelling Practice and Theory.Volume 94, July 2019, Pages 100-117















