在过去的几十年里,移动机器人和自主系统已经成为一个热门的研究课题,带来了重大的进步和创新。如今,移动机器人可以在包括军事、医疗、太空和商业应用在内的各个领域自主执行复杂的任务,可以在地面、海上和太空中运行。在未来几年内将一支机器人团队部署到月球用于建设目的是行星和太空应用的主要计划之一。在这些应用中,移动机器人平台应该执行复杂的任务,包括在复杂的动态环境中导航. 如果机器人平台被设计为在其环境中自主导航而无需任何人工干预,甚至在没有全球导航卫星系统 (GNSS) 的情况下,它就需要自我定位。视觉里程计 (VO) 已用于没有全球定位系统 (GPS) 信号的空间应用。由于低功率要求、可用性和高度物理紧凑性,视觉相机是最常用的传感器,可用于空间应用以执行视觉导航。独立于机器人平台上安装的传感器,VO可以在单个平台的基础上实现,即每个机器人独立执行自定位,也可以协同实现,即每个机器人的自定位至少通过数据融合获得两个机器人。
提出了一种新算法来定位行星应用中的机器人团队。在所提出的协作 VO 算法中,两个主要模块在每个机器人上同时触发,包括 VO 和环路闭合检测 (LCD) 算法。前者使用稳健的运动估计算法获得机器人的位姿。后者将从立体相机获得的机器人的当前视图与共享的关键图像进行比较,以检测具有挑战性的行星环境中的闭环。假设机器人配备立体相机作为主要观察传感器。所提出算法的总体方案如图1所示。
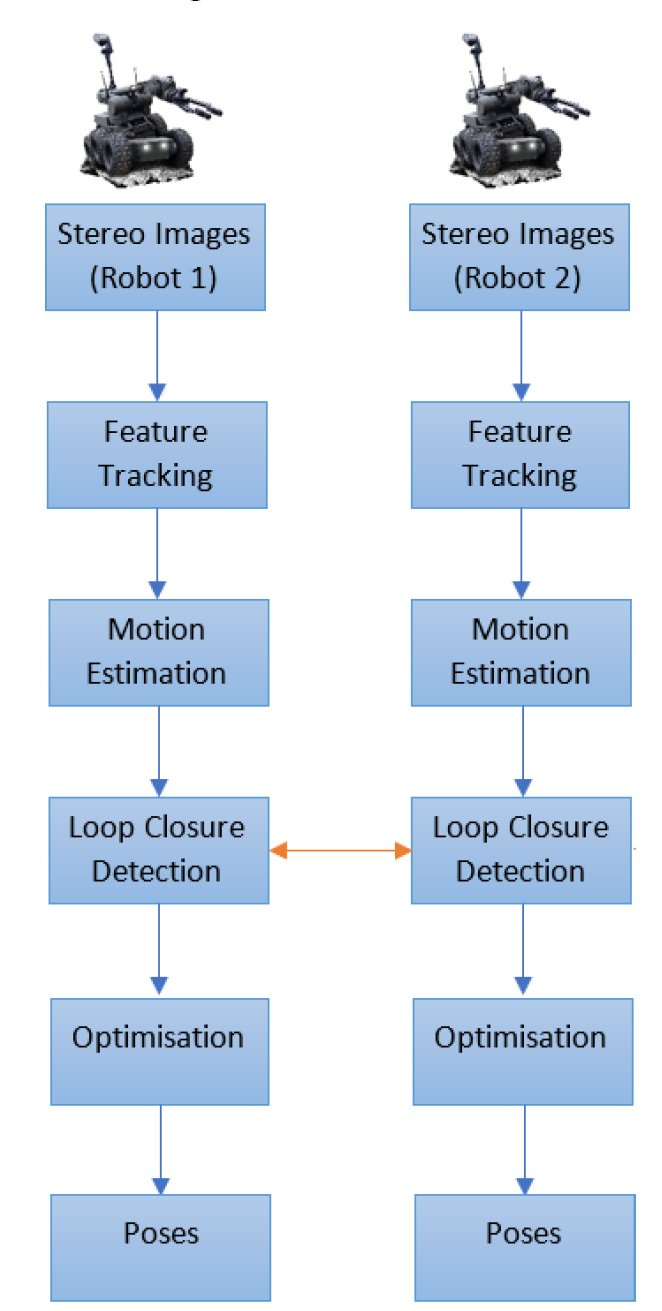
图1 所提出的合作VO算法的总体方案
特征跟踪
在接收到立体图像流后,检测和匹配不同图像的特征点对于相机跟踪和映射任务都是必不可少的。为了获得更稳定的特征提取和跟踪结果,将每张图像划分为桶,将特征点传播到整张图像中。
运动估计
特征跟踪成功后,触发运动估计以获得两帧之间的相对位姿。通过连接每个相对位姿估计,可以检索机器人的完整轨迹。
闭环检测 (LCD)
合作 VO 的主要挑战问题之一是正确管理来自环境的感知信息。协同 VO 算法的性能高度依赖 LCD 机制,这需要正确识别先前观察到的区域。
优化
姿势图方法用于存储 3D 姿势表示的信息。位姿图包含由边缘连接的节点,边缘约束定义节点之间的相对位姿和该测量的不确定性。
为了验证所提出的方法并将结果与文献中可用的现有方法进行比较,使用了行星模拟真实数据集。行星模拟数据集由图 2所示的两个移动机器人获得。该数据集由摩洛哥Tafilalet地区三个不同行星模拟站点上的两个移动机器人收集。

图2 行星模拟真实数据集中的移动机器人
所选数据集中机器人的ground truth (GT) (Minnie in Merzouga, Trajectory 22, Replay 1) 1及其初始位置如图3所示,机器人的运动方向如箭头所示。
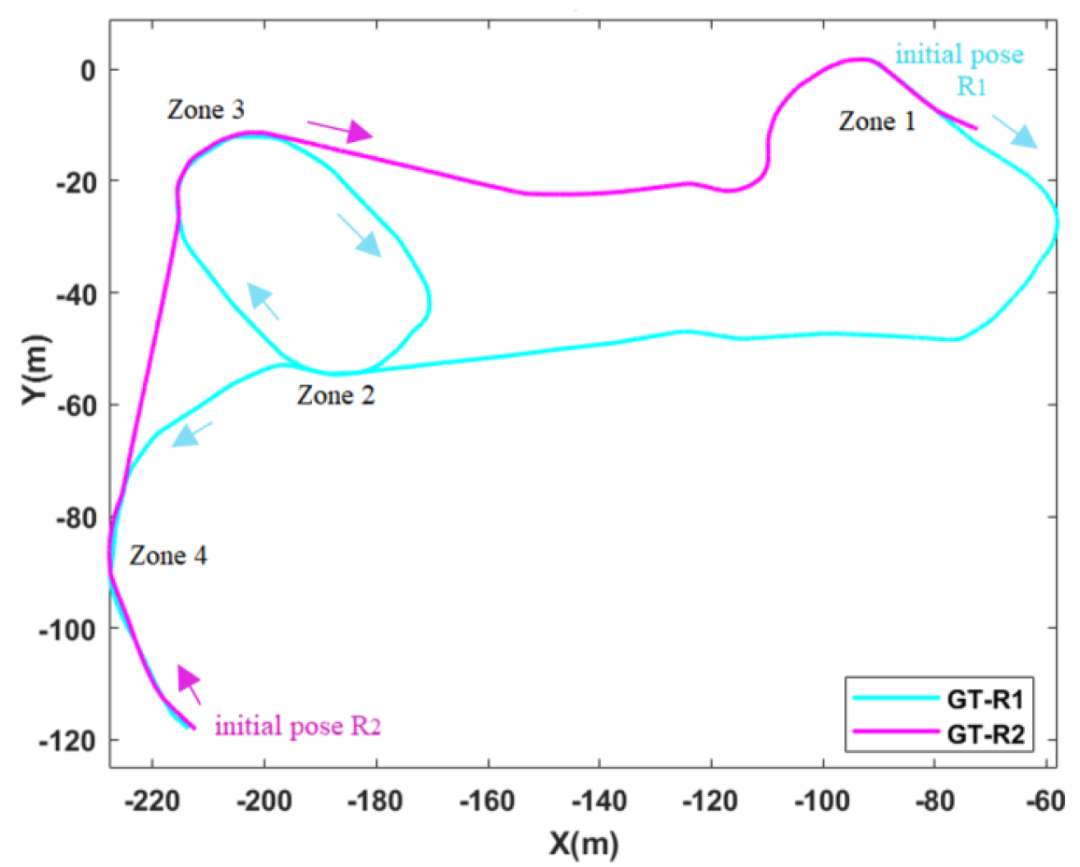
图3从Erfoud数据集中选择轨迹的地面实况和机器人的初始位置以及闭环区域
使用LCD算法检测到的一些环路闭合和相应的匹配图像如图4所示。
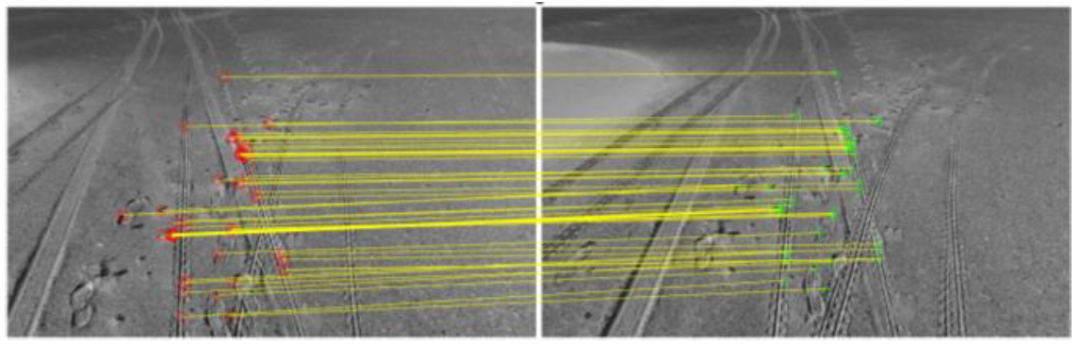
图4 使用 LCD 算法的对应图像和匹配特征点(图像:0013 vs 1974)
在图5中研究了单一版本的VO算法的准确性,其中绘制了机器人的轨迹并与GT进行了比较。在该图中,应用所提出的CVO 算法获得的轨迹也与GT进行了比较。
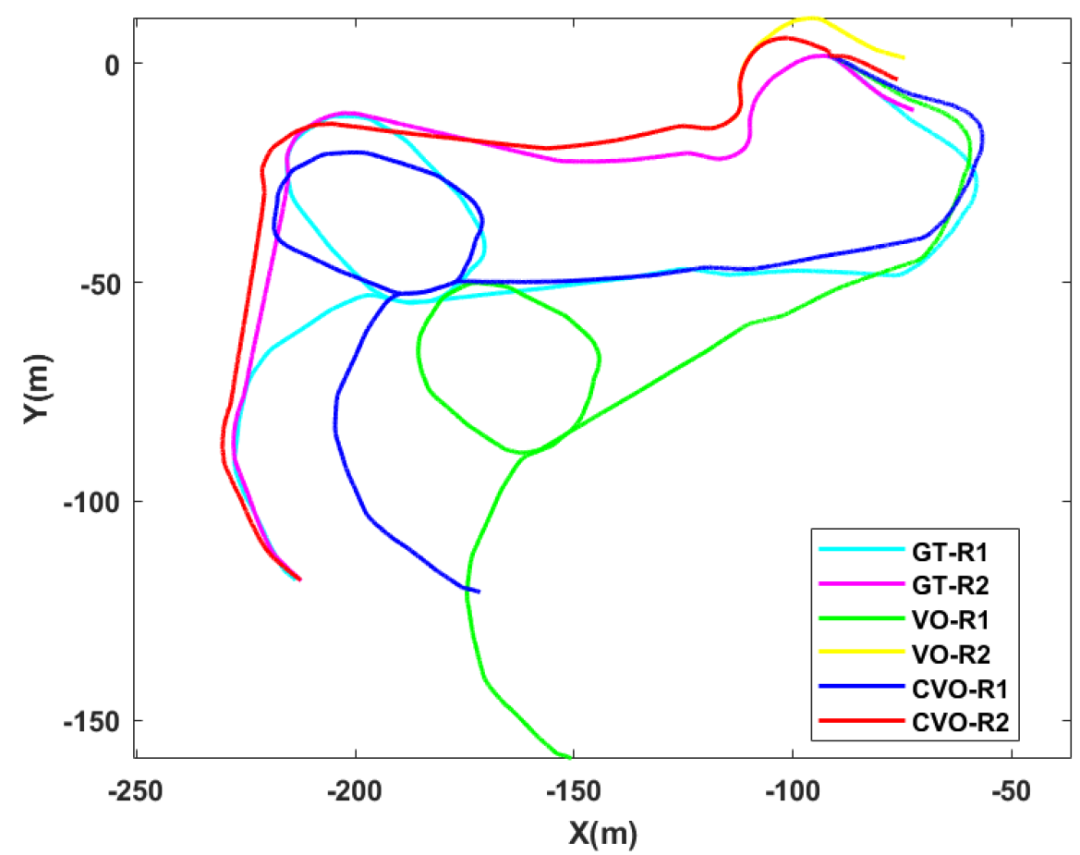
图5 通过协作VO(CVO)和单个VO的机器人估计轨迹的比较
可以看出,单一版本的 VO 算法在机器人2在绿线所示的环境中运动过程中具有较高的漂移。由于机器人1在区域3检测到机器人2观察到的部分环境,因此在检测到环间闭合后,机器人1的优化过程将触发。可以看出,通过利用所提出的方法,机器人1轨迹的准确性发生了显着提高,如图5中的深蓝色所示。
通过将所提出的协同算法与成功的LCD结合使用,可以获得有希望的结果。这项工作的未来方向包括但不限于研究通过代表性实验数据集证实的所提出算法的有效性以及扩展到协作视觉 SLAM。
源自:2021 IEEE International Conference on Robotics and Automation (ICRA 2021)















