SLAM在自主机器人方面的一个有前途的应用是在建筑工地。建筑机器人提供了一种消除工人危害、提高任务生产力和收集高质量数据的方法。然而,这些环境给SLAM系统带来了许多挑战。无特征的场景、不同的照明条件和突然的运动是主要挑战之一。在这一阶段中,包含相关场景和传感器的数据集的可用性发挥了重要作用。这些场景应描绘部署SLAM系统的实际应用程序,通过融合多个互补的传感器来实现最高的精度和鲁棒性。因此,SLAM数据集应包含多个传感器模态。
我们提出了Hitli SLAM挑战数据集。该数据集的目的是促进传感器融合的研究,以开发SLAM算法。该算法可以部署在需要高精度,毫米级和鲁棒性的任务中,例如在建筑环境中。我们的数据集包含建筑工地、办公室和实验室的室内序列以及建筑环境和停车场的室外序列。为了记录数据,我们创建了一套传感器,包括许多视觉、激光雷达和惯性传感器,使用商用传感技术的最新产品,特别关注时间同步和空间校准。该数据集用于Hitli SLAM挑战赛,许多学术和工业团体提交了他们的SLAM系统。挑战的结果表明,所提出的数据集可以成为开发准备在现实世界中部署的新SLAM算法的重要资产。
在室内、室外和室内外混合环境中收集各种条件下的数据。数据显示了不同施工阶段的实际挑战。挑战包括可变照明、有限的功能和/或高反射和透明表面,如图1所示。

图1 获取数据集的位置
(a) 地下室
数据是在无窗房间(约20×40米)中收集的。无自然光,照明亮度混合。带有建筑基础设施的混凝土空间。地下一层是一条短而简单的路径。在地下三层和四层,我们将传感器平台安装在移动底座上,而不是手持操作。地下三层和四层还允许利用SLAM系统的闭环功能。
(b) 校园
数据是在户外庭院环境中收集的(约40x60 m)。良好的自然采光和高照明。与建筑结构和自然植物的混合特征。
(c) 工地
大部分在户外,有一些有遮盖的区域(约40x80米)。自然光线强,照度高。未完成的自然表面,地平面上方的特征有限。
(d) IC办公室
室内空间有许多窗户和反光表面(约10x70米)。自然光和人造光的混合。窗户照明强烈,室内照明适中。
(e) 实验室
室内空间以大窗户为主(约10x10米)。强烈的自然光和反光表面。光学跟踪六自由度地面实况。
(f) Mitte办公室
建成办公楼的室内空间(约30x50米)。自然光和人造光的混合。很多建筑结构。
(g) 停车场
室内和室外空间的混合(约100x100米)。停车场从顶楼到底层。照明从极亮到适度的黑暗不等。顶层为地平面结构,下层为大量建筑结构。
(h) RPG跟踪区域
室内测试设施(约30x30米)。大部分是人造光,有些是自然光。单个大房间,整个房间有随机运动路径。MoCap 6自由度地面实况。
数据集以二进制格式(rosbags)存储,其中包含图像、IMU和LiDAR数据。对于来自Livox的数据,选择了自定义消息,因为与标准ROS PointCloud2消息相比,该消息包含额外的定时信息。图2显示了数据集Lab Survey 2中的相机和激光雷达数据的示例。
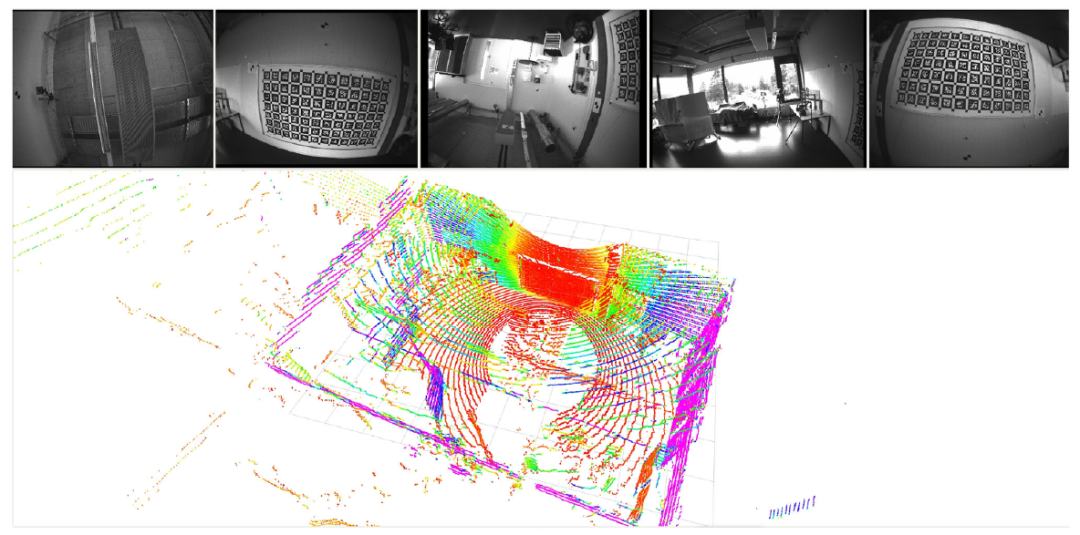
图2 数据集“Lab Survey 2”中的示例:来自5个摄像头和Ouster OS0点云的图像
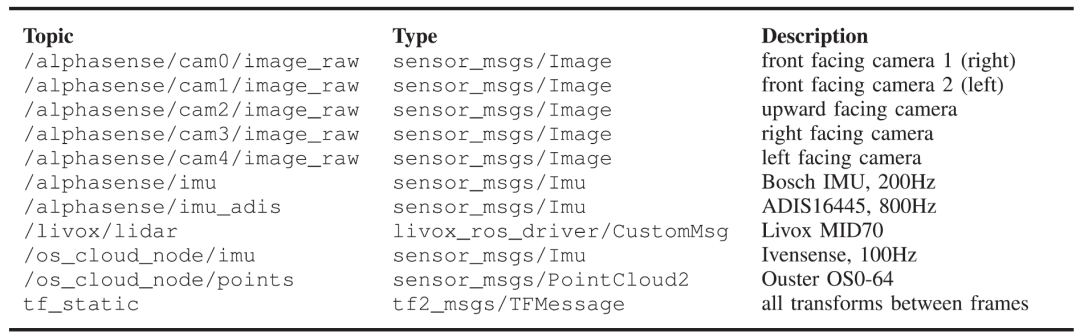
每个数据集的地面实况数据都在一个单独的文件中给出,文件名指示参考源(例如Construction_Site_prism.txt表示在prism框架中的地面实况)。包中的所有主题列于表1。
表1 消息主题和ROSBAGS类型
在序列Basement 4 中,当Phasma设备位于房间
中央时,LiDAR 里程计算法A-LOAM的数量特征轨迹仍然很高(每帧约1000 个),但当设备接近墙壁或近悬垂时它显着减少,见图3(a)。在这种情况下,A-LOAM估计轨迹的准确性会受到负面影响。但是LiDAR特征轨迹的减少可以通过视觉特征的增加来补偿,见图3(b)。这种情况下,可以通过融合相机和LiDAR测量的算法实现最佳性能。
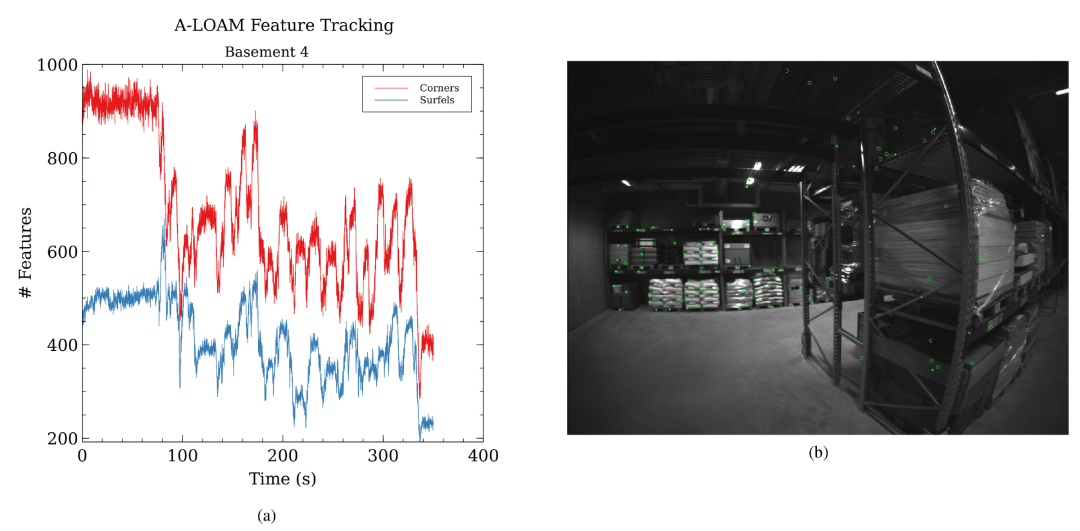
图3(a)使用基于激光雷达的SLAM算法A-LOAM在“Basement 4”中跟踪的特征(b)低LiDAR特征事件期间的局部环境(时间约336秒)。封闭的墙壁和结构减少了LiDAR测量,而基于视觉的算法仍然可以正常运行
提议的数据集用于Hitli SLAM挑战赛,该挑战赛第一版在2021 年 IEEE/RSJ IROS 会议上举行。学术和工业团体提交了其SLAM算法在数据集的所有序列上的解决方案。共有27支队伍参加了挑战赛,其中有7家商业公司,详细见表2。
表2 Hitli SLAM挑战赛的结果。包含每次提交说明的报告可以在数据集网站上找到
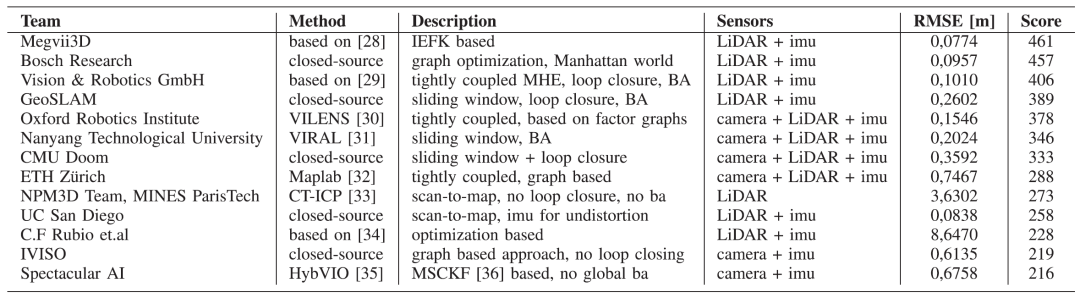
前四位被商业算法占据,这些算法都专注于激光雷达-IMU里程计,显示了这些方法的成熟度和鲁棒性。最好的团队Megvii使用了FAST-LIO2的变体,并在所有序列上实现了9.3厘米的平均误差。旷视科技是为数不多的将Ouster和Livox LiDAR数据合并的团队之一,再加上使用所有LiDAR点进行状态估计,这给了他们一个显著的优势。将视觉与LiDAR和IMU融合在一起的最佳算法排名第5位,牛津机器人研究所的VILENS。最佳纯视觉解决方案排名第12位,大多数误差大于50厘米。结果表明,不出所料,商业算法优于学术算法。然而,在这次挑战之前,确切的差距尚不清楚。结果还表明,由于获胜团队没有融合相机数据,因此仍有改进的余地。
源自:IEEE ROBOTICS AND AUTOMATION LETTERS, VOL. 7, NO. 3, JULY 2022















