本期教程利用Lua脚本实现5-150公斤垂直起降无人机多轴自动调参,自适应PID调参,代替“手动调参”过程,已在多台起飞重量为50-150公斤的垂起中验证完毕,对比原多轴自动调参更加安全可靠。
该脚本为QLOITER模式下用于四翼无人机或LOITER模式用于多轴无人机设计,但也可以在其他VTOL模式下使用。
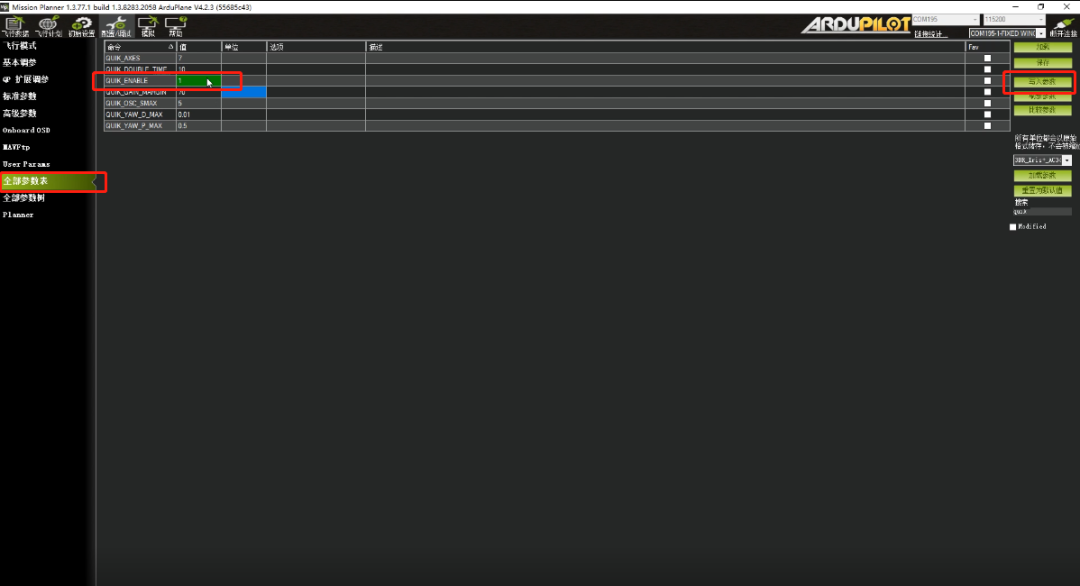
参数设置
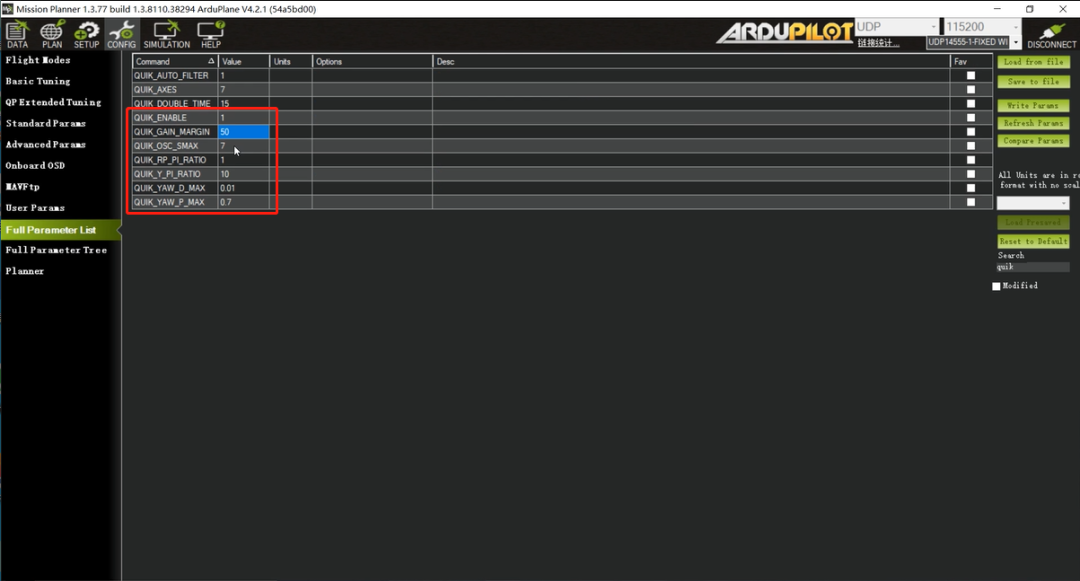
QUIK_ENABLE设置为1,表示启用脚本。
QUIK_AXES默认值为 7,表示滚动、俯仰和偏航。如果只需滚动和俯仰,设置为3,只需偏航,则设置为4。
QUIK_DOUBLE_TIME默认值为10(秒),表示可以控制调参时增益的提高速度。
QUIK_GAIN_MARGIN默认值为70%,表示要使用的百分比增益裕量,一旦找到增益的振荡点,增益就会降低此百分比。
QUIK_OSC_SMAX默认值为5(Hz),表示赫兹的振荡阈值,用于检测增益升高时的振荡。50kg的无人机,值为3可能更适合,100kg的无人机,值为1.5可能更适合。如果参数调整完后仍有明显振荡,可以判断是此参数设置过高,这时应将此参数减半,然后重试。
QUIK_YAW_P_MAX最大设置为0.5,适用于大多数垂起无人机。
QUIK_YAW_D_MAX最大设置为0.01,适用于大多数垂起无人机。
具体操作
01
启用谐波陷波滤波器(点击蓝字即可查看教程),该调参系统需要开启谐波陷波滤波器降低陀螺仪噪音后才能进行,噪音太高将无法使用。
02
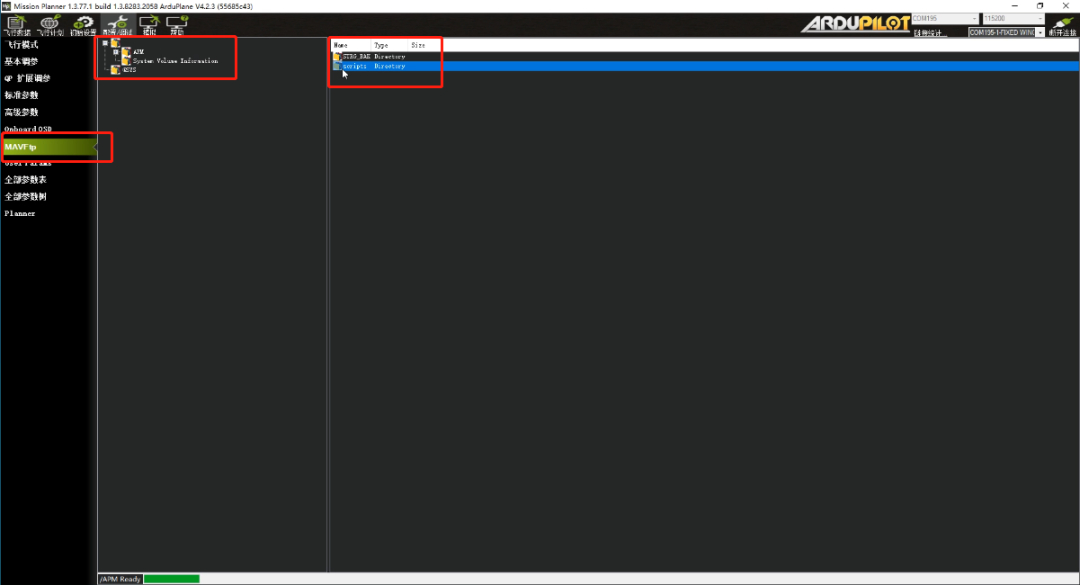
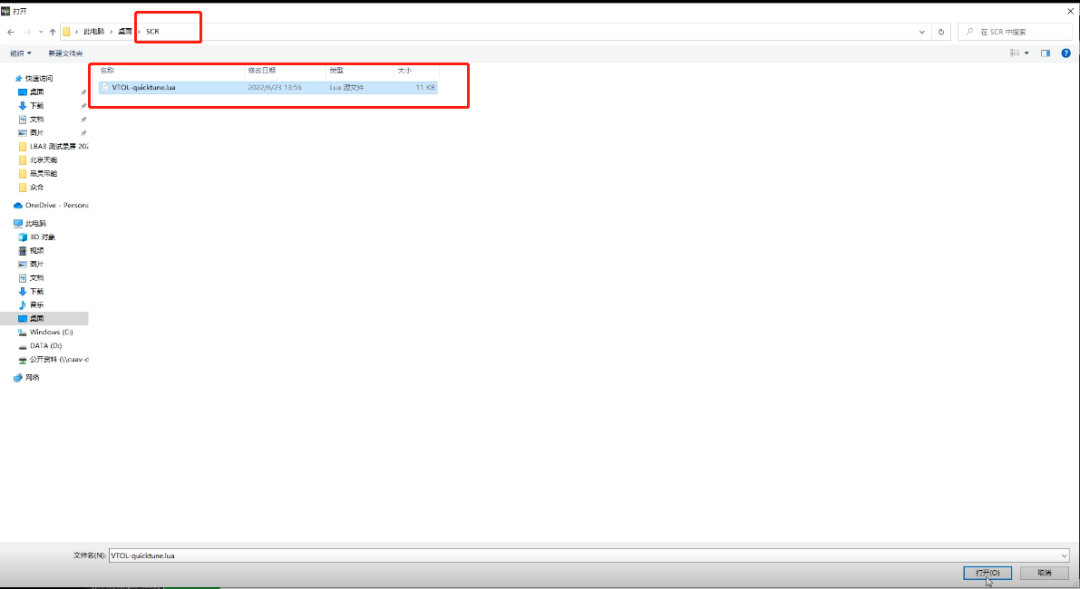
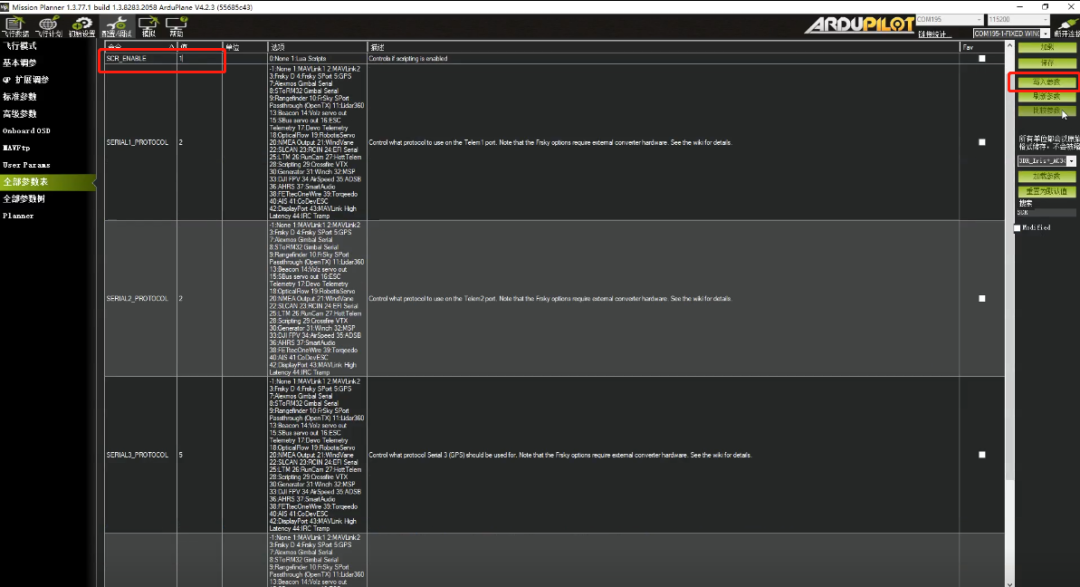
将Lua脚本(后台回复“脚本”即可获取)安装在飞控MicroSD卡的APM/SCRIPTS目录中,将SCR_ENABLE设置为1,重新启动并刷新参数,然后将QUIK_ENABLE设置为1。
03
在可用的RC输入通道上设置一个3位开关来控制调参。例:如果通道6可与3位开关一起使用,则应设置 RC6_OPTION=300以将调参控制与该开关相关联。
04
将无人机设置为QLOITER模式(四翼)或LOITER模式(多轴),并使其在低风中稳定悬停。
05
将步骤03中选用的通道控制开关移动到中间位置,开始调整过程,此时可以在地面站上看到显示调参进度的信息。
06
当使用默认设置时,则自动调参会依次调整以下参数:RLL_D,RLL_P,PIT_D,PIT_P,YAW_D,YAW_P。
07
当地面站提示“Tuning Done”则表示调参完成,此时将开关拨到高位来保存参数,保存参数时地面站将提示“Tuning Save”表示参数保存完成。若开关拨到低位,则不保存此次参数,所有参数将恢复为原始值。
Lua调参完毕,进行暴力打杆测试PID稳定性(该操作具有危险性,请勿随意模仿)。从视频中可以看出,本次调参效果良好,说明自动调参有效。
2008,将无人机开源飞控引入国内,推出了自主设计的高性价比无人机控制器,推动和填补了国内无人机空白。
2012,CUAV正式成立且建成自家生产线,并与国际ArdupilotPX4建立合作,完善了无人机控制器及相关产品。先进的产品与可靠的品质,获得了行业的认可。
2015,组建研发团队,开始软硬件共同研发。成为Dronecode基金会成员,成为Ardupilot官方合作企业。2016,业内首款自主研发mavlink协议的无线高清图数一体链路-Hacklink问世,将客户群扩大至世界各个角落。
公司整体搬迁至中国(广东)自由贸易区广州南沙新区,研发工程师达到20多名,推出高精度差分GPS: C-RTK并大量应用在测绘、无人机表演行业。2018,通过国际质量标准体系ISO9001认证。且推出业内首款商用的:LTE网络的无人机云端系统(UAV-HUB)、LTE网络的通讯模块(LTE-LINK),将无人机无限距离远端控制、云端化的理念引入行业应用。
2017,现在,我们已经拥有自己的研发团队与生产线。并开发了PC端,安卓端,网页端的无人机应用,配合自主研发的飞行控制系统 、GPS定位系统、 无线数字链路系统和无人机云端(UAV-HUB)解决方案, 让无人机更好的服务于每一个应用。
















