无人机研究领域的快速发展,结合电子设备和传感器小型化的改进,将小型无人机 (SUAV) 的使用带到了现场。SUAV 可以低成本生产,并且它们减小的尺寸使其有机会进行协调和协作,从而提供灵活的环境,不仅从CPU或内存资源的角度,而且从地理的角度来看,网络服务可以分布。一般来说,多无人机系统是可扩展的、灵活的,并且由于故障的可能性是分布的,它们可以提供服务生存能力。然而,多无人机系统确实存在一些挑战,必须解决这些挑战才能获得合适的性能。由于多无人机网络的特殊特性,这些基本设计挑战中的一些与无线通信相关。
多无人机系统所展示的服务供应环境特别适合5G软件化技术,例如网络功能虚拟化 (NFV)或软件定义网络 (SDN )。在这种情况下,仍然必须面对的最突出的挑战之一是所有这些新解决方案与其在实际场景中的部署之间存在的巨大差距,因为现场测试很困难且成本高昂执行,并且模拟替代方案不合适,因为它们不是专门为这些用例设计的。因此,为了解决多无人机系统和解决方案的固有挑战,需要在设计和实际验证过程之间进行中间步骤。
提出了一个用于多无人机和 FANET 场景的开源验证平台,可以部署和测试基于5G可编程无人机的不同服务。该解决方案建立在 Linux Containers (LXC) 和 ns-3 网络模拟器之上,并提供了一个仿真框架,允许集成不同的虚拟网络功能 (VNF),稍后可以将其与网络模拟器一起用于真正的SUAV 硬件。此外,该框架使真实硬件直接与仿真环境集成,不仅可以测试应用程序和开发的性能,还可以测试硬件中的正确操作这将承载现实世界的发展。
框架架构
图1总结了 VENUE 的架构,系统的全局视图如图右侧所示。仿真层负责创建和建模 FANET,它还仿真 UAV 移动性。顶层代表真实节点,这些节点包含支持多无人机场景的开发和应用。两层的集成不仅允许通过模拟的 FANET 链接真实节点,而且还为每个无人机提供移动性。在图的左侧(节点视图),突出显示了 ns-3 节点和真实节点之间的连接。
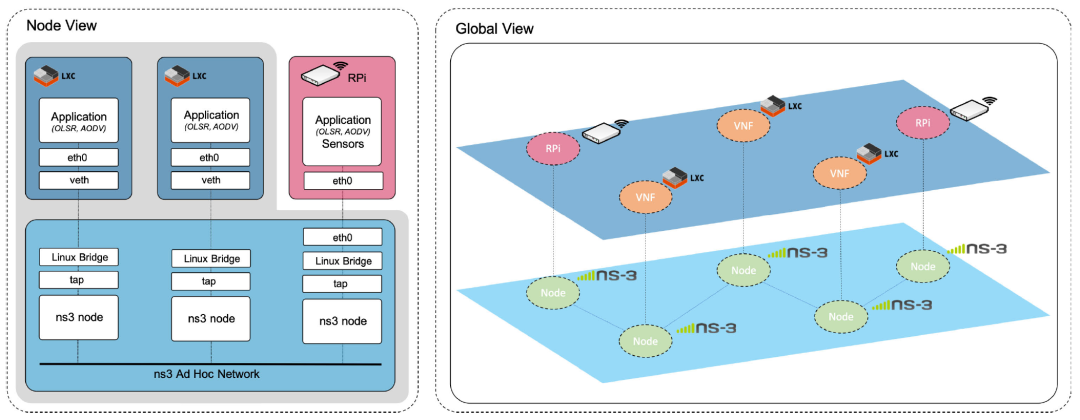
图1 Airsim模块库
案例1:FANET 场景
该场景代表了由 7 支 SUAV 机队提供的服务,用于在常规蜂窝网络不可用或不足时(例如紧急情况、大规模事件)启用通信,例如 VoIP 通话、视频广播、5G 网络访问。在这种 FANET 任务中,SUAV 通常确实有固定的位置,事实上,为了节省电池,它们会尽可能地栖息在陆地上。如图2所示,将 SUAV 放置在具有静态位置(悬停)的网格中,形成 FANET。每个SUAV都由一个使用VENUE平台的Linux容器表示。

图2 FANET 的路由协议
图3显示了测试的快照,其中可以欣赏单个实验的 SUAV 更换发生的时刻(底部),以及目标SUAV的相应接收吞吐量(上)。当源-目的地路径中的SUAV被替换时,目的地的接收吞吐量随之下降。该图表明,替代对吞吐量的影响取决于被替代的SUAV。
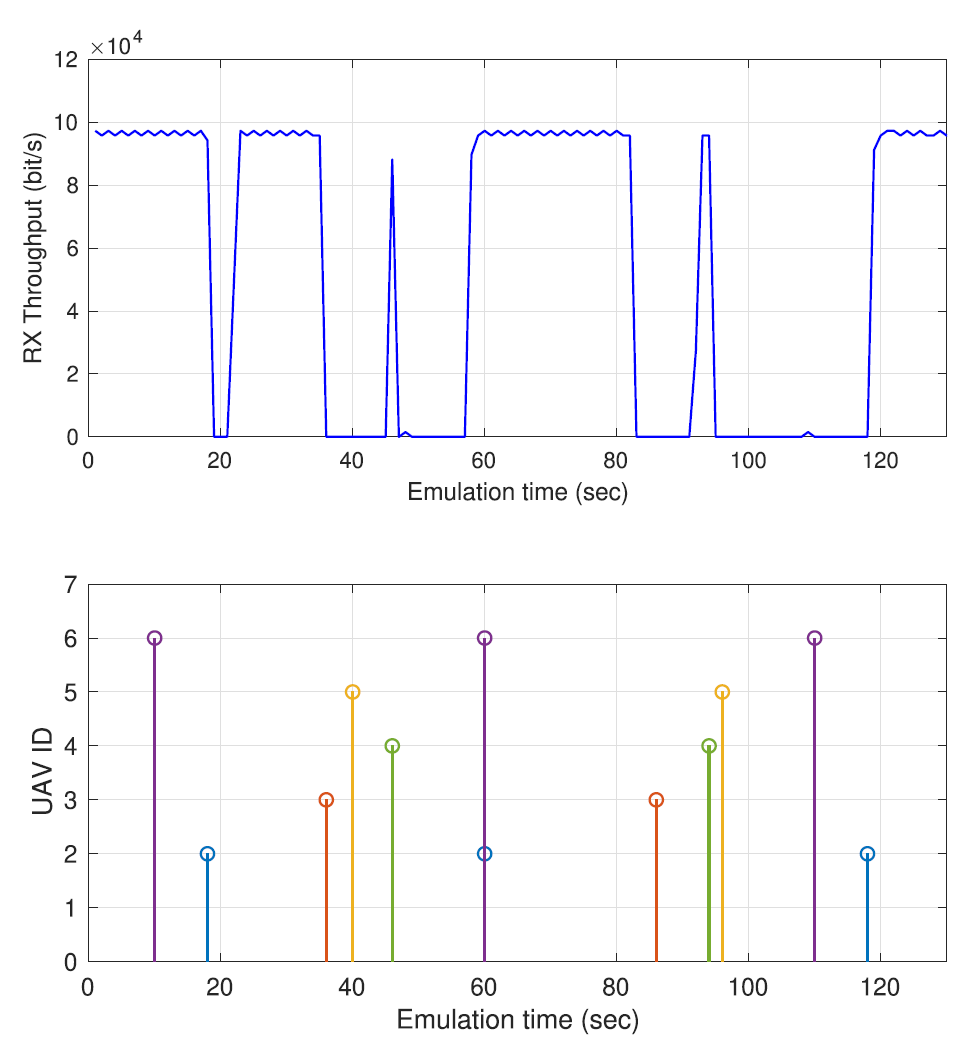
图3 在其中一项实验中接收到目标无人机的吞吐量(每 50 秒失败一次)
图 4说明了系统中丢失的数据包百分比取决于电池寿命。为了表示这些数据(对应于30个实验),我们选择了箱线图。通过箱线图,可以很容易地感知数据分布的中心和分散。红线与数据的中值匹配。蓝色框代表50%的数据(从75%到25% 的值)。

图4 第一种情况下不同替换值的丢包率
图 5显示了所有 SUAV 的利用率百分比,定义为通过 SUAV 的数据包除以源生成的数据包总数。在图中,可以看出 SUAV 1 具有 100% 的利用率,因为它是产生交通流的来源。也可以看出,SUAV 4 比其他 SUAV 的使用率更高。

图5 无人机 Wi-Fi 利用率百分比
案例2:FANET 扩展 5G 连接
该场景包括一个三架 SUAV 机队和一个地面控制站,用于例如在紧急情况下启用通信,如图 6 所示。该服务已使用一组虚拟功能和虚拟网络进行实例化,这些虚拟功能和虚拟网络在 FANET 之上运行,以提供灵活和动态的连接骨干网和服务部署。

图6 多无人机网络扩展5G连接
在图 7(b)中,可以看到有效载荷是如何被整合到飞机中的。在图7(c)中,可以看到无人机与有效载荷一起飞行。地面控制站是一个 mini-ITX 计算机(Intel Core i7 2.3 GHz、16GB RAM、128GB SSD、4 GbE端口),它还充当云操作系统。该设备可以在图 7(a)中理解。

图7 实验中使用的真实硬件
图 8显示了管理 NFV 平台的计算、存储和网络资源所需的 OpenStack 控制器和 SUAV 3 计算节点之间的控制流量。由于 SUAV 2 的更换,该图显示接收到的流量下降,而计算机节点继续稳定地向控制器发送流量。

图8 OpenStack 控制计算节点中的流量
本文在两个不同的用例中验证了 VENUE 功能。第一个用例验证了真实软件(在本例中为虚拟实体)与 VENUE 平台的集成,并评估了 FANET 路由协议。第二个用例验证部署在真实无人机硬件之上的网络服务功能。提议的用例中显示的结果表明,VENUE 平台适用于多无人机系统的原型设计和开发,减少了开发和生产阶段之间的差距。预计在不久的将来,一些开发项目将包含在 VENUE 中。
源自:Digital Object Identifier 10.1109/ACCESS.2019.2949119















