近年来,无人机群技术因其巨大的应用潜力得到了广泛的研究。无人机群作战灵活、机动、密集,无人机可以适应多种任务。随着相对测量技术的发展无人机之间的信息共享技术,可以实现无人机在群任务中的协调,如坐标搜索和测量。因此,无人机群技术是无人机技术未来的发展方向之一。目前,无人机导航主要依靠惯性测量单元(IMU)和全球导航卫星系统(GNSS)接收机。然而,IMU存在持续漂移误差,GNSS信号容易受到外部干扰,通常不可靠。
提出了一种基于分层协同导航结构的无人机群协同导航方法。与传统的单一主从式导航不同,群中的飞机根据在线估计的定位精度分为两层,即主从层和跟随层。利用这种基于分层协同导航结构的动态协同导航模型,导航系统可以协同地从主从故障中恢复。
分层协同导航方案设计
图1显示了具有恒定合作关系的传统单领导者-追随者协作导航的结构。
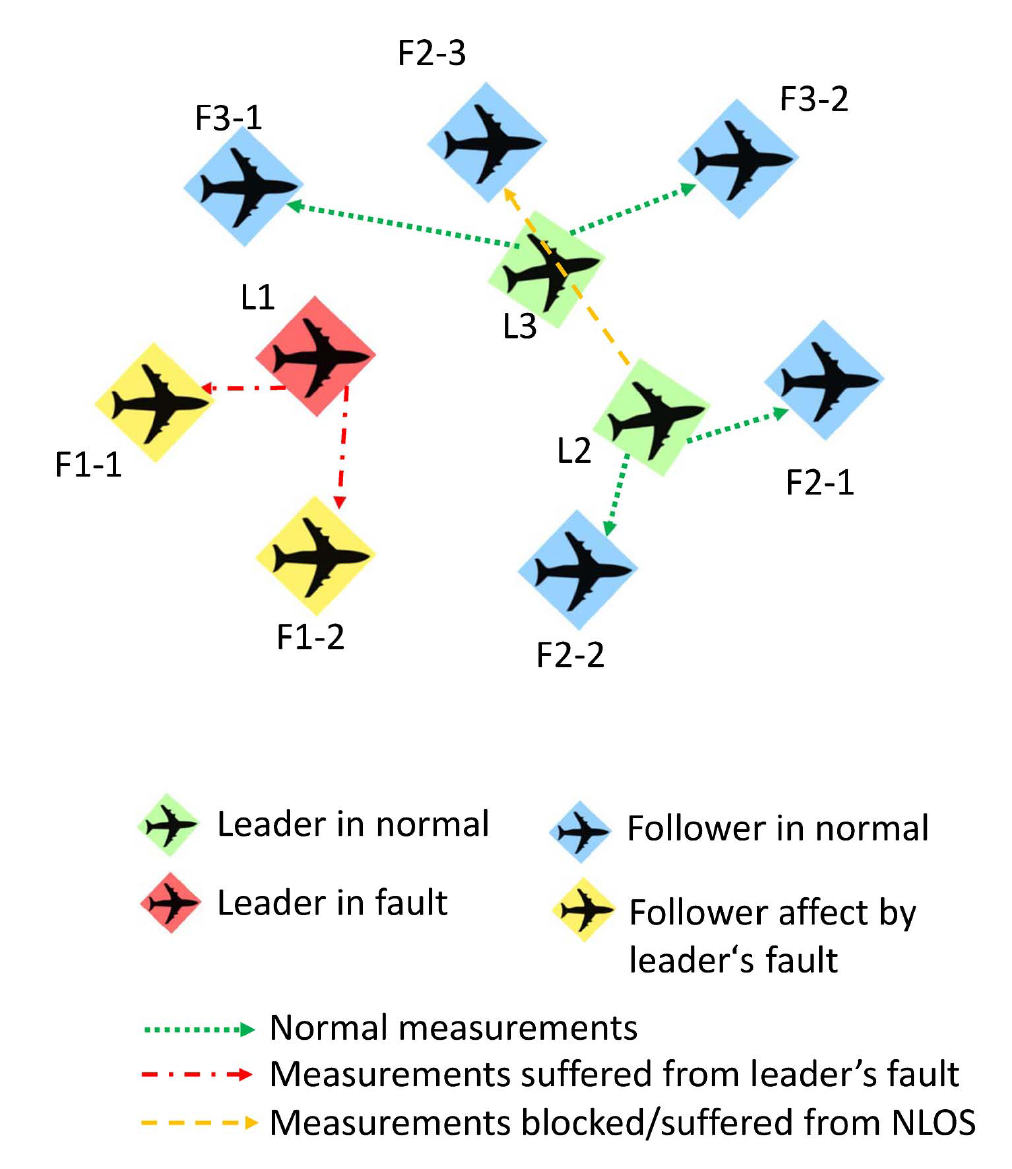
图1 传统的单主从导航结构
在图1中,领导者和追随者飞机之间的合作关系是恒定的。随动飞机可以从传感器收集的先导飞机接收相对测量信息,以保持导航性能。然而,当领头飞机出现导航故障(图1中用L1表示)时,跟随飞机(图1中的F1-1和F1-2)将受到影响,导航性能将显著降低。因此,系统的可靠性较低。此外,在无人机群飞环境下,传统的单主从结构无法充分利用多机协同测量。为了克服传统的主从式导航结构的缺点,提出了一种分层协同导航结构,如图2所示。
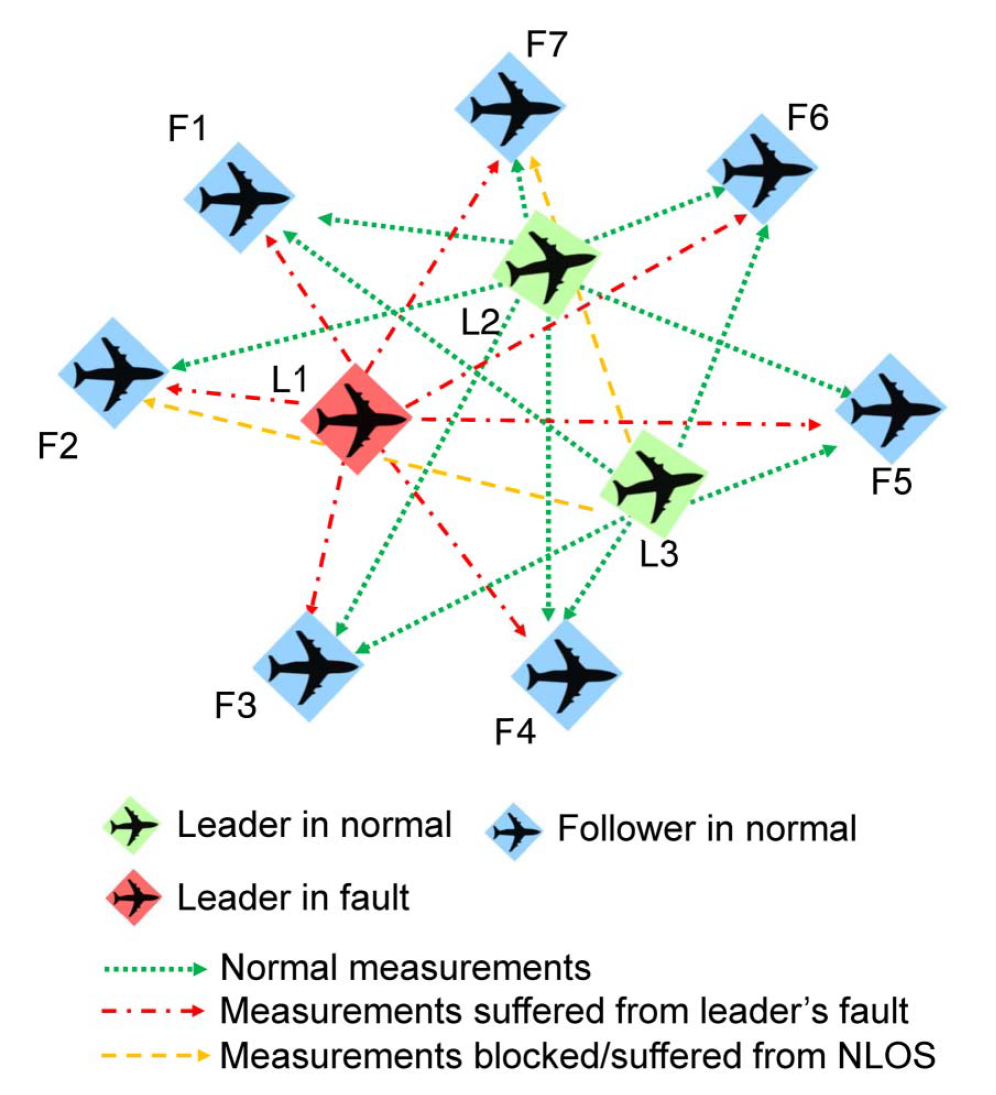
图2 提出的分层协作导航结构
改进的多主从式结构根据定位精度将群系统中的所有飞机分为主从式飞机和跟随式飞机。所有领头飞机都可以向跟随飞机传输协同导航信息。当领航机导航传感器出现故障时(图2中用L1表示),其他领航机工作正常,仍然可以从其他领航机(图2中的L2和L3)接收协同导航信息。因此,多主-从结构具有较高的可靠性和鲁棒性。此外,一架跟随飞机可以同时从多架引导飞机接收协同导航信息。与传统的单导联结构相比,多导联结构在故障情况下能更好地保持随动飞机的导航性能,而单导联结构中一架随动飞机只能接收来自一架先导飞机的相关信息。
这里考虑了两种情况:一种情况是领导者和跟随者之间的相对测量被他们之间的另一个成员阻止,另一种情况是领导者和跟随者之间的相对测量受到NLOS干扰误差的影响。对于本文讨论的场景,同时测量相对角度和相对距离,因此可以获得从跟随者到引导者的视线(LOS)向量。根据图3中分层协作导航结构的几何结构,对于与多个引导者协作的跟随者,如果给出了到至少一个引导者的视线向量和相应引导者的位置,则可以确定跟随者的位置。这意味着分层协作导航结构具有灵活的特点,因为至少有一个协作领导者能够有效地进行协作定位,这对车辆间的连通性部分受阻的情况具有鲁棒性。
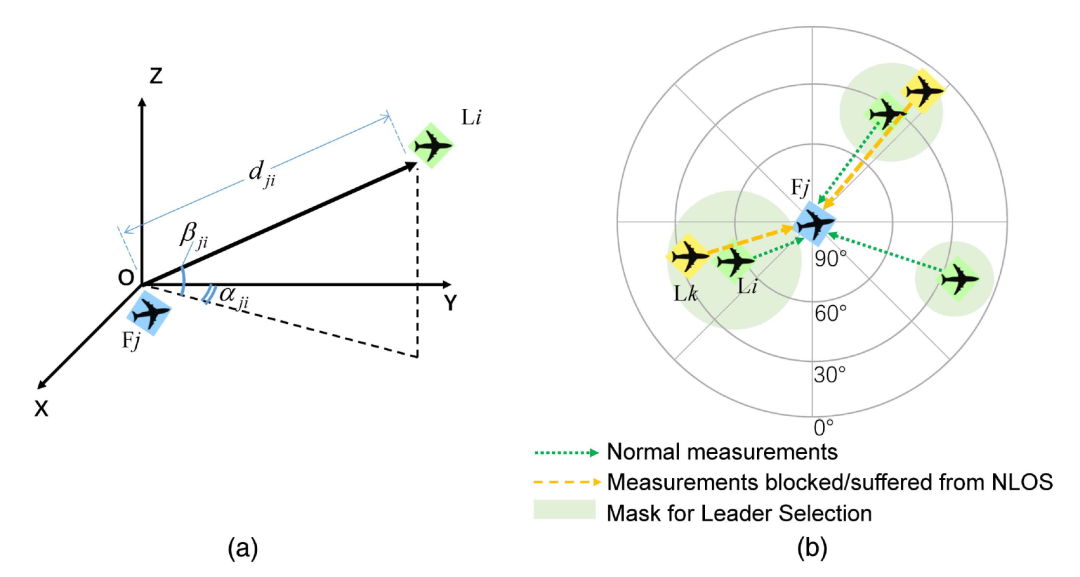
图3 分层协同导航结构的几何结构:(a)局部笛卡尔坐标系下的车间观测;以及(b)局部球面坐标系中用于引线选择的遮罩
分层协同导航算法
根据“分层协作导航建模”部分中建立的协作导航模型,可以设计分层协作导航算法。图4显示了协作导航系统的框架。
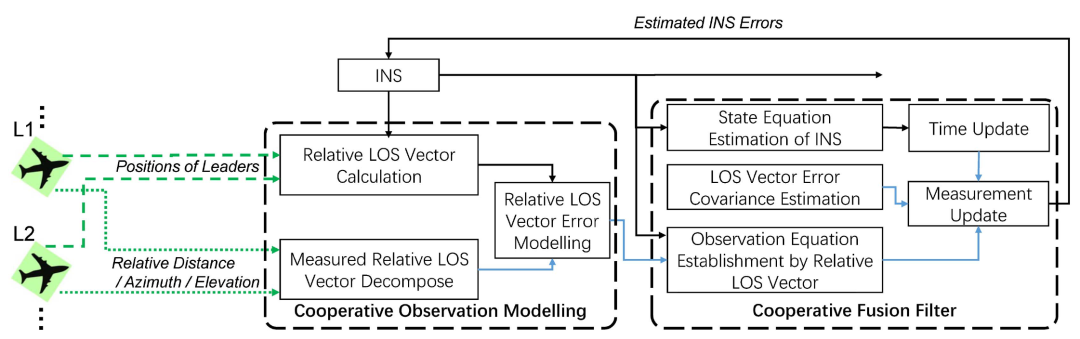
图4 分层协作导航系统的框架
跟随机可以同时从多个引导机接收不同类型的协同测量信息,例如相对距离、相对方位角和仰角。根据接收到的信息,可以得到相对视线矢量计算和被测相对视线矢量分解;然后,建立相应的协同观测模型。在此基础上,建立了状态方程和观测方程,并根据合作观测关系对跟随机进行视线矢量估计。然后,设计一个合作融合滤波器,将领航机提供的合作测量信息与群中跟随机上机载导航系统的测量结果进行融合。
仿真分析
为了验证算法的有效性和协同导航模型的正确性,进行了仿真。在本次模拟中,参与swarm飞行的飞机数量为30架。模拟时间为3600秒。群中飞机的模拟飞行轨迹如图5所示。
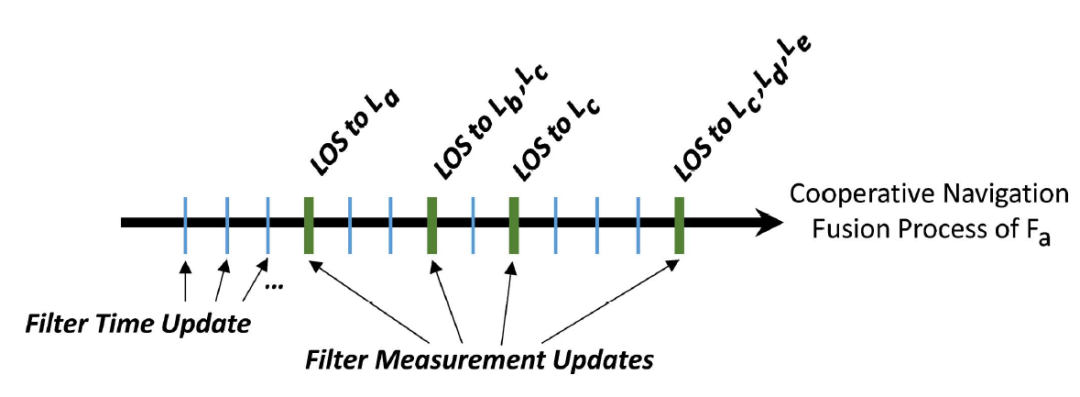
图5 协同导航融合过程
在图6中,虚线表示引线的飞行轨迹,实线表示跟随器的飞行轨迹。
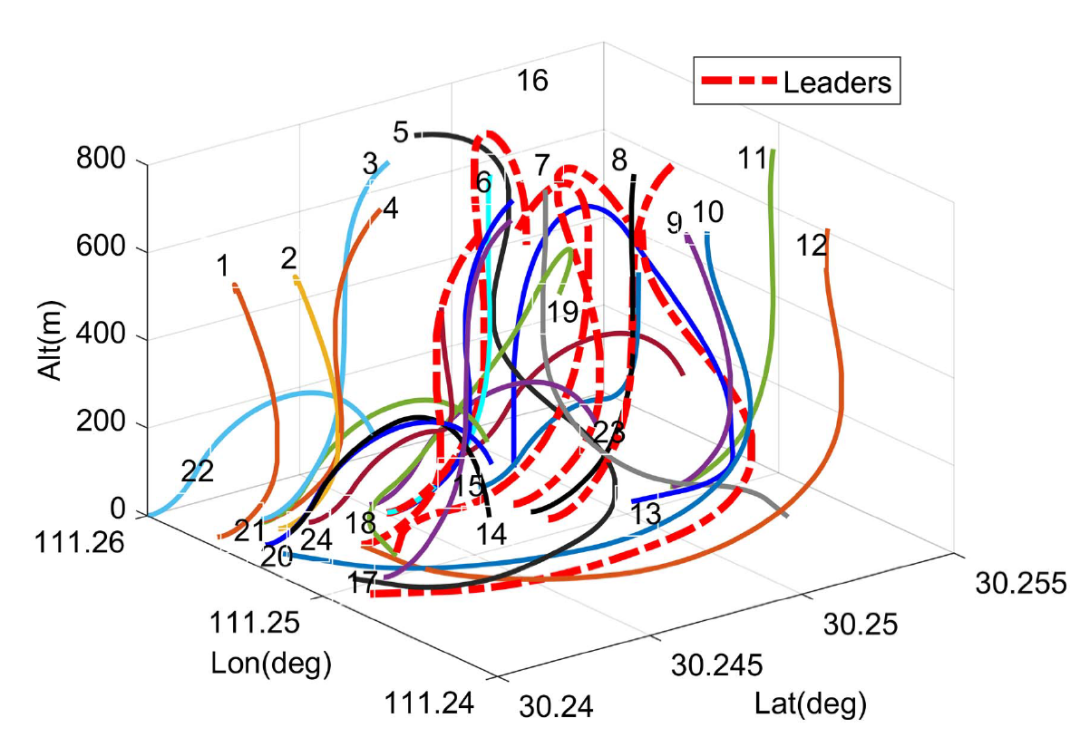
图6 群中飞行器的飞行轨迹
提出了一种基于无人机群层次结构的容错协同导航方法,建立了无人机群协同导航模型,设计了一种层次化协同导航算法。仿真结果表明,与传统的SLF算法和FCF算法相比,本文提出的分层协作融合算法提高了低精度跟随器的定位精度,且跟随器位置误差受相对距离和角度误差的影响较小。该方法还提高了协同导航系统的容错能力。当一些领导者受损时,整个协同导航系统可以继续工作,故障后领导者位置可以恢复,从而验证了该方法的有效性。
源自:J. Aerosp. Eng., 2021, 34(1): 04020097















