无人机由于维护成本低、无需驾驶员操控、具有高度的灵活性和可扩展性等特点,在军需和民用方面都具备广泛的应用场景。近年来,无人机作为一种新兴行业得以蓬勃发展,给各行各业提供了全新的作业方式,重新塑造了生产力。
伴随应用层次的扩展、无人机性能的逐步提升,各种类型的无人机如雨后春笋般涌现,数量也呈现爆炸性增长的趋势。民用市场中,就中小型无人机而言,多旋翼与固定翼分别占据半壁江山,各自具有较强的差异化优势,适用于不同的应用场景。具体而言,多旋翼能够垂直起降、空中悬停而且机身灵活,适用于复杂环境精细的作业;固定翼具备速度快、续航长、效率高的特点,适用于大范围的巡查。
两者的差异化优势很大程度上是互补的,随着行业需求的细化和应用场景的丰富,采用多旋翼和固定翼进行多机型协同作业是未来发展的趋势,能够充分实现能力互补,达到“1+1>2”的实际效果。可以预见,未来的天空中将会出现各式各样的飞行器协同工作。
为了使不同类型的飞行器在天空中能够安全自由地飞行,需要设计一套合作方案,固定翼飞行器和多旋翼飞行器都遵循这样的一套方案,进行合作从而避免碰撞,这也是构建合理空中交通系统的基础。本文旨在为固定翼和多旋翼飞行器设计合作策略,能够保证不同种类的飞行器运动到目标地点的同时避免与其他飞行器发生碰撞。

图1
本文介绍了固定翼和多旋翼飞行器集群避碰的问题,并针对该问题介绍了避碰算法的基本思路,然后将避碰算法写入集群控制模型,进行三维空间避碰的数值仿真和视景仿真,最后介绍了搭建的仿真平台的基本功能和仿真效果,能够集成化地测试避碰算法的效果。
本文导读
研究问题
避碰算法设计
仿真综合测试与平台搭建
研究问题
本文所要解决的具体问题是对一个由固定翼和多旋翼组成的异构飞行器集群设计合理的避碰算法和控制器。集群中每一架无人机能够知道自身的实时位置和速度,并考虑估计噪声;每一架无人机通过通信获得其余无人机的位置和速度,并考虑估计噪声和通信延迟。本文选取了多旋翼主动避碰固定翼飞行器的避碰策略,研究避碰算法以及集群控制器的设计,根据集群的实时状态输出每架无人机的控制速度,实现异构集群沿预定轨迹运动且相互之间不发生碰撞的目标。
为了简化分析和设计,假设集群中飞行器的初始位置均能保证飞行器相距足够远,可以忽略飞行器形状的影响,避免出现无法避碰的极端情况,并且为集群设置了管道飞行的场景。管道的作用在于为异构飞行器集群设置了公共的运动空间,引导并限制集群在管道内运动至目标点。
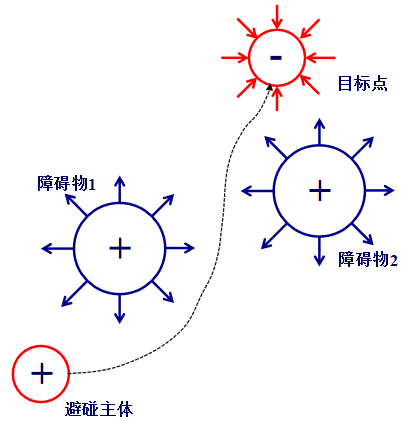
图2
避碰算法设计
结合人工势场法和VO(Velocity Obstacle)算法提出了适应多旋翼避碰固定翼场景的避碰算法,我们分别看一下人工势场法和VO算法的具体含义。
人工势场法将无人飞行器视作带电微粒,障碍物视作带有同种电荷产生斥力势场,目标点视作带有异种电荷产生引力势场,无人飞行器在电势场中受合力作用避开障碍物并到达目标点,应用人工势场法的关键在于设计合理的斥力势场函数。
图3
VO算法首先定义了VO区域的概念,在二维平面内它的几何直观是一个半径无穷大的扇形区域,在三维空间中它的几何直观是一个锥形区域,它在物理含义上代表了避碰主体的速度取值区域,当避碰主体的速度位于这片VO区域时,表明避碰主体会与障碍物发生碰撞。为了能够达到避碰的目的,需要在VO区域之外选取避碰主体的速度,具体的速度选择标准可以包括:速度指向终点、速率最大等等。
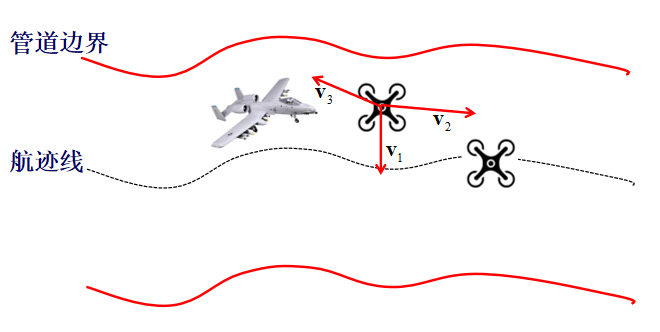
图4
本文的避碰算法结合了人工势场法和VO算法并应用于多旋翼飞行器。首先根据人工势场法计算得到控制在管道内飞行的速度、沿航迹线前飞的速度以及避碰其余多旋翼的速度,三个速度分量的矢量加和得到偏好速度。偏好速度不一定能够避开固定翼飞行器,所以需要依据VO算法进行判断和调整。如果偏好速度位于VO区域内,就需要在VO区域之外寻找一个距离偏好速度最近的速度作为输出避碰速度。
图 5
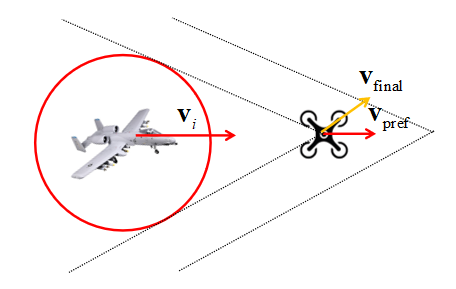
图6
仿真综合测试与平台搭建
该部分首先搭建了集群控制模型,并将人工势场法与VO算法结合的避碰算法写入控制器模块,进行三维空间内多旋翼避碰固定翼的数值仿真,并编写显示接口模块,在UE4显示引擎中显示飞行器集群避碰的场景,数值仿真和视景仿真的效果图可以看下面两幅动图。
图7
图8
仿真结果表明,在避碰算法的作用下多旋翼集群能够向两侧散开,主动避让从后方驶来的固定翼集群。在本文中,我还将本文提出算法和单独的人工势场法进行了避碰效果的比较,结果表明本文的算法在多旋翼避碰固定翼场景中的避碰更具有优势。
为了能够方便于避碰算法的综合测试,本文还搭建了仿真测试平台,设计了图形化界面,目前的平台支持手动输入、文件导入和批量生成三种输入方式,具体的界面使用方法和平台仿真效果下面的视频进行了展示。搭建的该平台能够任意修改集群数目、初始位置和通信噪声参数,实现在多种条件下的综合仿真。
图9
图10
本人在北航可靠飞行控制研究组完成本科毕业设计。本文节选并改编于“张璇. 异构飞行器空域下的多旋翼避碰控制设计[D] 北京航空航天大学本科学位论文,北京。”















