导读
近日,国际顶级机器人期刊IEEE Transactions on Robotics发表了MIT助理教授YuFeng Chen与哈佛博士生Siyi Xu,港城大副教授Pakpong Chirarattananon合作的昆虫级软驱无人机(Insect-Scale Soft-Actuated Aerial Robots)的最新研究。该无人机不仅能实现空中悬停,快速爬升,还可以实现空中翻滚,以及承受飞行过程中的人为碰撞。
一般而言,无人机需要广阔的空间,因为它们既不能在狭窄空间中快速导航,也不能在受到撞击以后保持飞行稳定性。现有的无人机都是体积相对而言较大的,而且大多数都需要足够的空间进行飞行动作。问题在于,能否设计一种昆虫大小的无人机,同时实现在复杂环境下稳定飞行呢?
飞行类昆虫由于体积小,飞行灵活,往往是近些年仿生无人机研究的重要领域。它们在复杂的自然环境随意改变飞行轨迹,有如杂耍一般,各种高难度动作都不在话下,比如空中翻滚,快速躲避障碍物,以及飞行中被撞了以后快速调整飞行姿态等等。
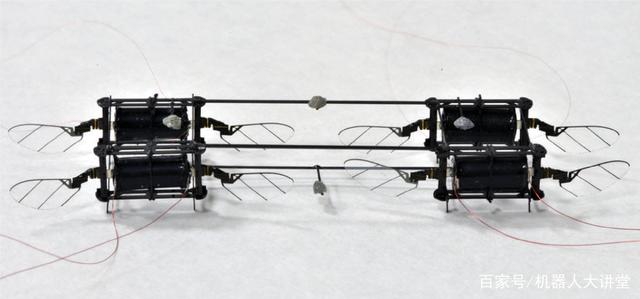
MIT助理教授YuFeng Chen由此受到启发,研制了一种新型的介电软体驱动器(dielectric elastomer actuators),用来驱动仅有0.6g重量的软驱类昆虫无人机。

软体驱动器主要由薄橡胶圆筒以及碳纳米管。当碳纳米管通电时,系统能够产生一定的静电力,不断地压缩及拉伸橡胶圆筒,实现类似于飞行类昆虫扑腾翅膀的状态,,每秒扇翅500次。

该实验结果表明,该介电软体驱动器能实现高能量密度(1.2kW/kg)以及高传输效率(37%)。该类昆虫无人机推力重量比高达2.2:1,上升速度高达70cm/s。
类昆虫无人机的显著改善要归功于新设计的高能量密度介电软体驱动器。通过采用新型的介电材料(Elastosil P7670)和降低电阻,新型介电软体驱动器的能量密度比之前提升足足一倍,传输效率更是提升560%。
类昆虫无人机静态试验:
同时,该类昆虫无人机可以实现空中悬停。
类昆虫无人机空中悬停:

以及实现从静态开始快速爬升。
同时,研究人员还进行了严苛的碰撞测试,在该类昆虫无人机飞行的过程中分别撞击包括无人机本体以及机翼,甚至采用猛烈撞击将其击落。该无人机仍然能够迅速恢复到稳定飞行状态,表现出强有力的抗撞击能力。
最为有趣的是,新研制的类昆虫无人机实现了翻滚动作,并在翻滚之后还能保持稳定的飞行状态。
康奈尔大学助理教授Farrell Helbling对比发表评论说,实现厘米级无人机是一件了不起的成就。因为这种软体驱动器具备柔顺性,所以无人机不需要特别进行设计就可以在障碍物很多的复杂环境中自由飞行。这个特点非常适合需要在凌乱的、动态的环境中飞行的无人机,对未来现实生活中的应用也有非常重要的指导意义。但他也同时表示,鉴于现在的类昆虫无人机采用高压线输电的方式,未来需要解决无人机的无线能量传输的问题。
MIT助理教授Chen表示,他希望未来无人机可以给农作物实现人工授粉,以及在自然灾害或矿难等事件中实行搜索与营救。
该研究主要由 Kevin Chen、以及 Kevin Chen 的学生任智健、哈佛大学软机器人学在读博士生 Siyi Xu、香港城市大学生物医学工程系副教授 Pakpong Chirarattananon 等人完成。
Kevin YuFeng Chen 2012年获得康奈尔大学应用及工程物理系学士学位,2017年获得哈佛大学工程学博士学位,导师为Robert J. Wood教授。现为MIT电子工程与计算机科学系助理教授。主要工作集中在为微型机器人设计高鲁棒性软体驱动器,以实现厘米级机器人在空气、陆地以及水中的运动。















