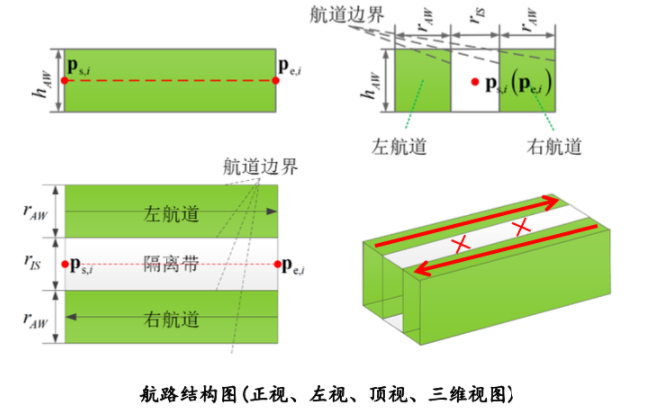
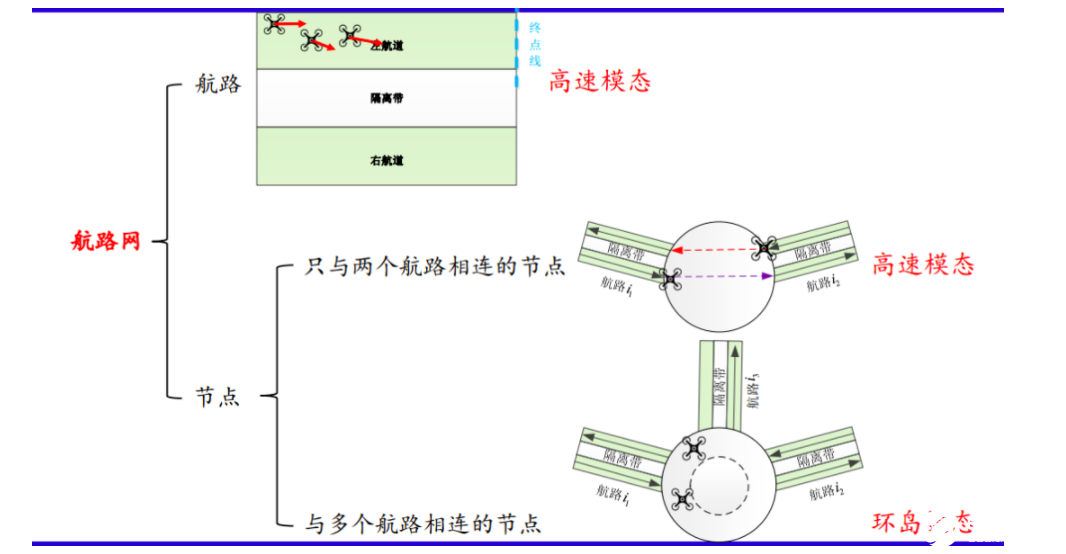
下图是航道的抽象结构示意图,航道内部我们参考了目前的高速公路,中间有一个隔离带,这个隔离带就是我们前面提到的两架飞行器之间的安全距离,它可以是双向的。
另一方面,航路网的节点也有结构,如下图所示,我们一般是以圆柱形结构。节点有多个航道相接,需要考虑不同航道的飞行器不能间隔太近,因此需要增加节点的半径,确保不同航道的飞行器间隔足够远。
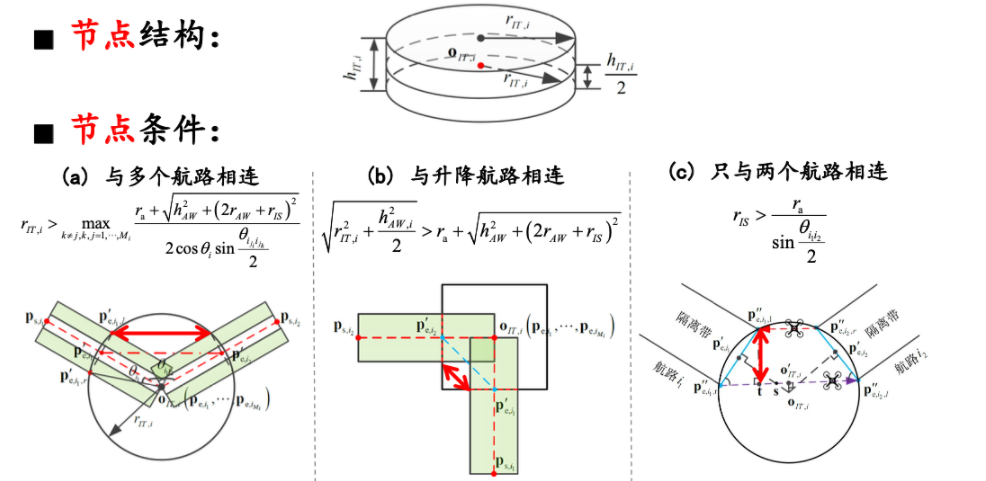
航路网有抽象的结构,内部也有具体的结构,通过一些约束条件,确保不同飞行器在任何情况下都能大于安全距离,这就让我们知道怎样去设计整个航路网。
3.1.2 无人机模型
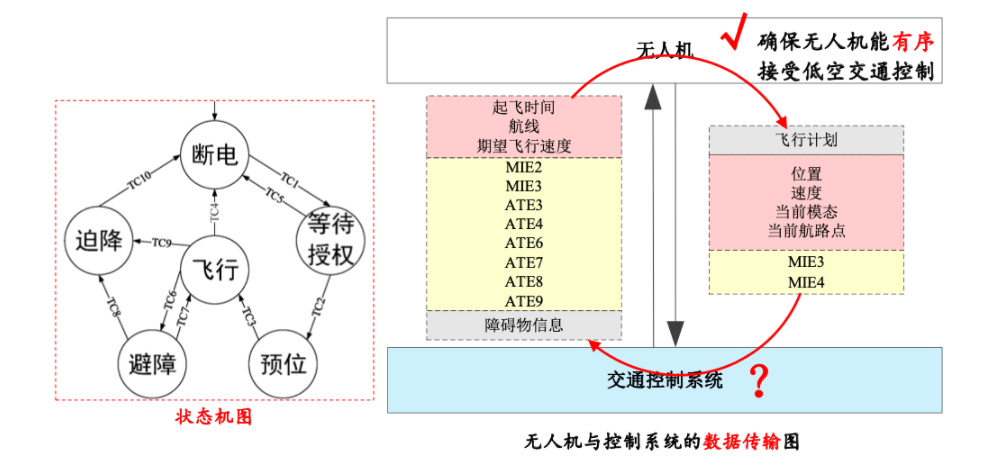
我们需要对无人机发出指令,这就需要有一定的标准的接口,接口我们有一些模态比如断电模态、等待授权模态、预位模态、飞行模态、避障模态、迫降模态给无人机发指令,这样的话,无人机就相当于被我们的交通控制系统控制了。这个接口我们目前还不是那么标准,我希望最终我们能有一套空中交通系统的标准。
3.2 算法设计
低空交通控制算法包括集中式空中交通控制和分布式空中交通控制。
3.2.1 集中式空中交通控制
集中式控制可以分为两个部分:离线规划和在线控制。离线规划就是说飞机起飞前需要申报自己的飞行计划,然后接受审核。如果当前的航路网非常堵塞的话,那么审核就不会通过,就需要等待或者重新申报飞行计划。如果审核通过的话,就会产生一个包含起飞时间、地点等信息的待飞计划,将待飞计划写入空中交通管理系统的数据库中,进而对空中交通情况进行预测。
但是飞行器在飞行过程中受天气、本身状态等因素影响会有很多不确定性,飞行器的飞行速度变化就会产生冲突。因此在飞行器飞行过程中,我们需要对飞机进行一些定量的控制,这就是飞行器的在线控制。我们可以通过控制飞行器的高度、速度等,使它能够避免冲突,如果在整个航路网中冲突无法避免,那么我们肯定不希望发生多米勒骨牌一样的效应,因为局部一个因素,使整个航路网都发生变化。避免冲突最简单的方法就是避障,一个飞行器向上飞,一个飞行器向下飞,这是空中交通的优势,汽车没有办法做到,大概是这样一个逻辑。
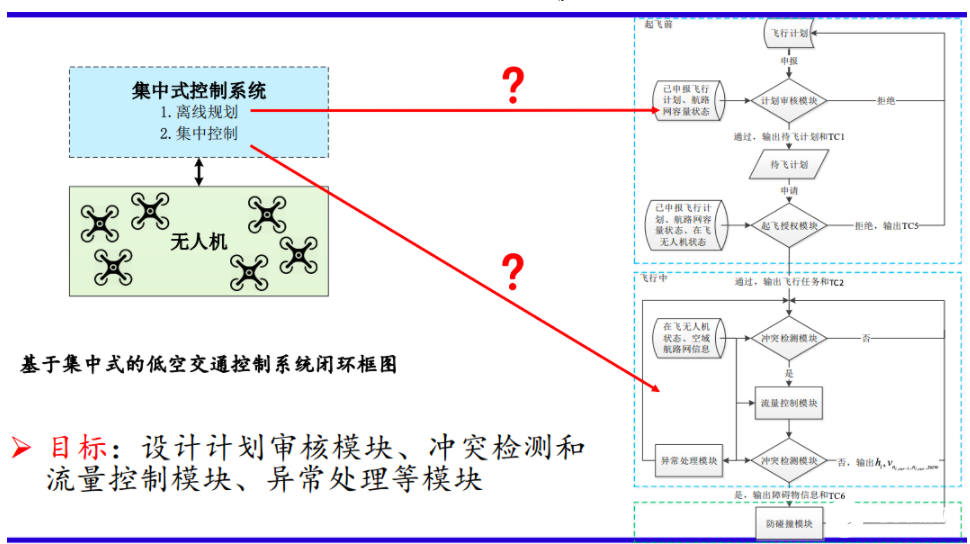
以下是基于集中式的低空交通控制系统中几个关键模块的算法过程:
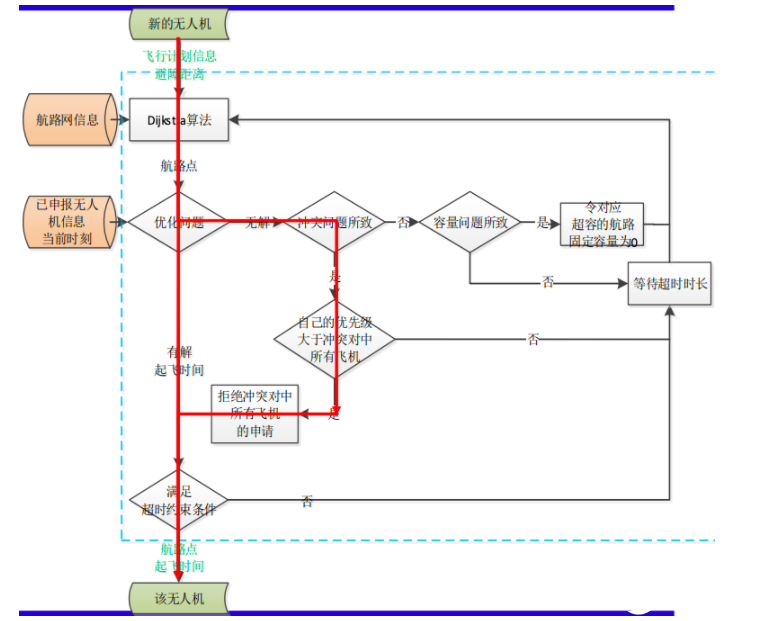
计划审核求解算法
步骤一:获取新加入的无人机 ???? 的避障距离 ????a和计划信息合集 ???????? ;
步骤二:更新航路网信息????和当前时刻 ???? ,通过Dijkstra算法得到无人机的航路点 ℎ????,并计算飞完全程所需的时间 ???????? ;
步骤三:对无人机 ???? 解优化问题;
步骤四:若有解则直接执行步骤五;若无解且原因是冲突问题,则判断与其发生冲突的无人机们优先级???????????????????????????????????? , ???? ∈ ???????? ,collision是否均小于自己。若是则拒绝无人机 ???? 的申请后执行步骤五 ,否则拒绝无人机 ???? 的申请 , 等待 ???????????????????? 时长后执行步骤二;若无解且原因是容量问题, 则暂时先令超容对应的航路固定容量为 0 ,再执行步骤二;其余情况均建议过 ????????????????????时长后执行步骤二 ;
步骤五:如果满足超时约束条件,则反馈无人机航路点和起飞时间;否则建议过 ????????????????????时长后执行步骤二。
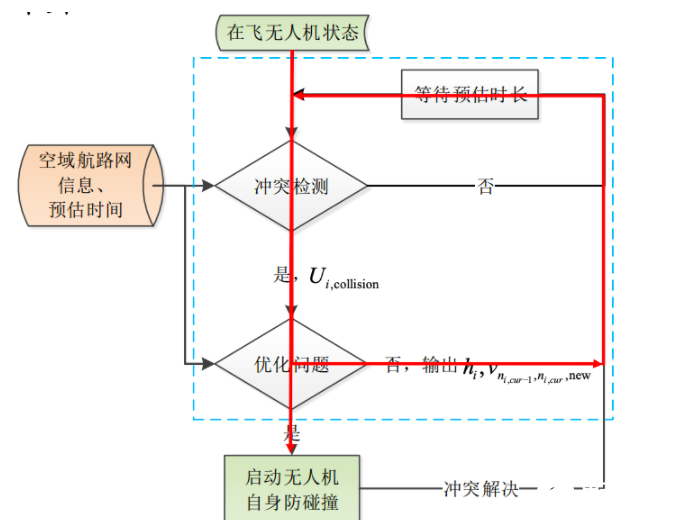
冲突检测和流量控制求解算法
步骤一:获取预估时间 ????max和避障距离 ????a ;
步骤二:更新航路网信息???? ,当前时刻 ???? ,所有已通过起飞授权的无人机信息 ???????? , ???? ∈ ????active 。对已通过起飞授权的无人机进行冲突检测,若有冲突无人机则输出发生冲突的无人机 ???????? ,collision和可能的冲突时间;否则执行步骤五 ;
步骤三:解优化问题;
步骤四:若有解则输出无人机在当前航路的新速度V n????,????????????−1,n????,????????????,new;若无解则输出事件刺激无人机启动自身防碰撞算法 ;
步骤五:间隔 ????max时长后 ,执行步骤二。
异常处理求解算法
考虑异常天气、交通管制等(外部因素)产生的冲突进行改航。
步骤一:获取航路网信息????,受影响的航路????ban,受影响的节点????ban,所有已通过起飞授权的无人机计划信息???????? ,???? ∈ ????active;
步骤二:将受影响的航路????ban和节点????ban剔除,更新航路网信息????;
步骤三:通过比对计划信息???????? , ???? ∈ ????active中的航路点ℎ????,筛选出受影响的无人机集合????ban,若????ban = ∅则输出无影响并终止程序;否则执行步骤四;
步骤四:对受影响的无人机采用迪杰斯特拉算法,输出新的航路点ℎ???? , ???? ∈ ????ban并更新???????? , ???? ∈ ????ban。
3.2.2 分布式空中交通控制
集中式空中交通控制系统中如果有某架飞行器要改变飞行计划,那么与之相关的所有无人机都需要重新在线规划,更新飞行计划,且规划复杂度随飞机增加而增大。因此,集中式框架计算复杂度太高了,我们希望有另一种框架。就像开车一样,我们要导航去哪个地方,地图告诉我们从a到b点怎么走。这个规划是我们在开车之前,地图就给我们设计好的。对于飞行器来说,起飞之前系统会根据空中交通情况确定飞行计划,但一旦起飞之后,就由飞行器自主决定怎么做,这就是分布式整体的框架。分布式框架把很多控制从地面站转移到了飞行器上,每个飞行器只管自己,整体上是有组织的,但在飞行过程中,飞行器会按照一定协议,与其他飞行器避障。这一部分我们提出一个概念叫Sky Highway 空中高速公路,我们有一篇论文《Sky Highway Design for Dense Traffic》简单的阐述了我们整个的思路,感兴趣的同学可以看一下。
关于航路避障的话,飞机可以直接在航道上进行一些避障的飞行,为了增加整个航路网的带宽,我们在节点处做了一些设计,比如说这个节点是为了改变方向的,我们也希望飞行器能够直接通行,这样话就不用等待。如果是多个航道相交的话,这叫做交叉节点,也就是交叉路口。平时我们经过交叉路口时,最常见的是红绿灯,但是红绿灯就意味着飞机要在这里等待。所以目前我们采取了环岛结构,应对像红绿灯这种低效率的等待策略。然后控制,我们大体上是像人工势场法这种思路来进行的,保证无人机在航道里面往前飞行,同时又不卡死。人工势场法有一些缺点,有可能会导致卡死,比如说我们大家都往一个点走,那可能谁都到达不了这个点,大家都想到达,但是无法同时到达,这就是卡死问题。我们目前把这些问题都解决了。然后还有环岛,我们做了比较细的一些研究,飞行器都能进入航道,又能够顺畅的出去,这个环岛设计算是我们的一个创新。
3.3 仿真与实验
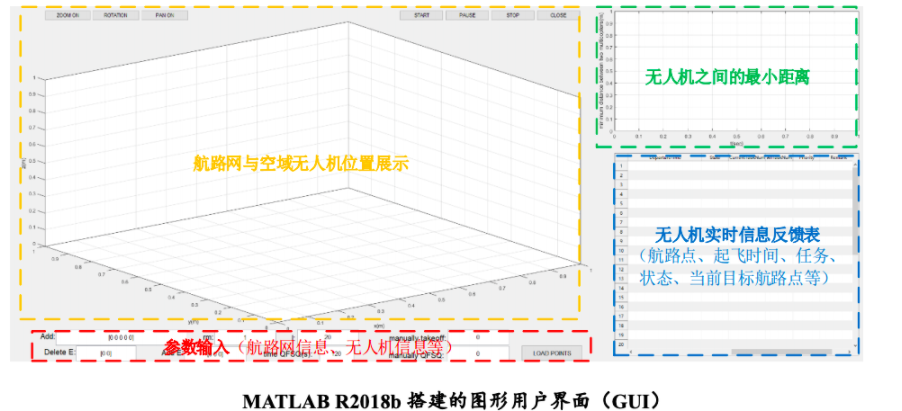
最后来介绍一下我们的仿真,我们自己搭建了MATLAB的一个仿真环境,其中有航路网信息,待审核无人机的信息,输入的禁飞区的信息等等,如下图所示:
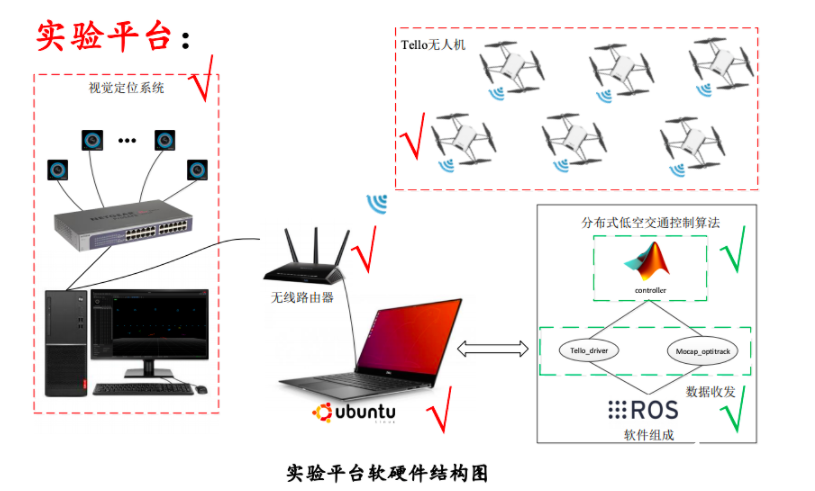
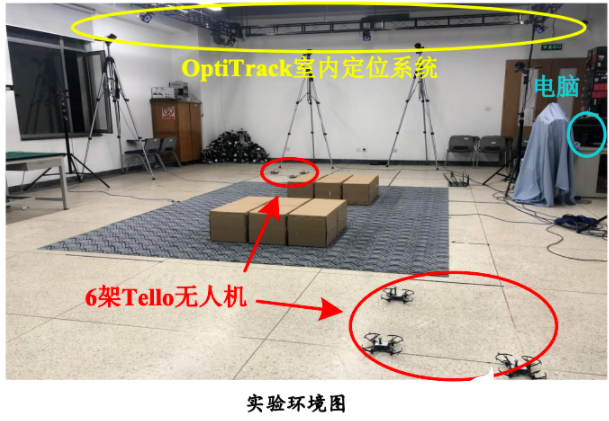
我们在实验室也做了一些相应的平台,用这种定位设施来做,如下图所示:
无人机空中交通或城市空中移动是大势所趋,无线网络和时空大数据是交通的基础,同时交通设计也对网络提出了新需求。我们对空中高速公路做了一系列的工作:
设计了航路网模型和无人机模型、基于集中式的低空交通控制算法,以及最重要的基于分布式的低空交通控制算法,在确保无人机安全飞行的前提下增大了流量。
搭建了仿真和实验平台,并通过用例测试验证了基于集中式的低空交通控制算法和基于分布式的低空交通控制算法的可行性。
未来我们希望继续在以下方面开展工作:
提升飞行状态预估算法效率。
机场高效调度。
固定翼飞行器的调度算法。
异构系统(旋翼机和固定翼混合空域)鲁棒性调度算法。
半物理仿真空管测试系统开发。
基于真实场景的飞行验证。















