编队仿真平台
搭建满足多无人机协同编队仿真的多无人机仿真平台,对于加快开发周期,降低多无人机编队试验成本,具有十分重要的意义。当前国内外已有一些针对无人机编队或多无人机仿真系统的研究,主要分为如下4类。
单系统仿真平台。利用C++开发出了Multi无人机2系统,用于协同控制研究。美国陆军研究所Garcia基于商用飞行模拟器软件 X-Plane和MATLAB开发的多无人机仿真平台,实现了4台无人机编队仿真。清华大学周昊等,基于多 Agent 技术开发出了名为无人机sim的仿真平台,采用分层的体系结构,在单系统内将算法、内核和显示完全分离,实现了多无人机的仿真, 此类系统成本较低,又可以验证无人机机群控制及协同规划算法,但与真实无人机编队的分布式体系结构不符,不能有效仿真无人机编队协同任务规划的全过程。
基于 HLA(high level architecture)架构的分布式系统仿真平台。HLA是由美国国防部在90年代末提出的,是目前分布式系统仿真的主要技术之一。基于 HLA 的仿真不需要处理底层通信传输、仿真运行管理的细节,实验者可将主要精力放在具体的仿真功能实现上。部分公司开发出基于HLA 的仿真平台,比如 VR-Forces、 FLAMES等,它们对底层的RTI进行了封装,提供了更加灵活强大的 API 函数,降低了开发难度。合肥工业大学研究团队开发出了基于VR-Force的分布式的无人机编队协同任务规划仿真系统,能够仿真多种任务场景下的无人机编队协同任务规划过程,以帮助验证不同类型的协同任务规划算法,仿真展示度高,但是也带来了较高的建设成本。
自主开发的多飞行器编队分布式虚拟系统仿真平台。该类平台是对除了HLA架构以外所有的分布式仿真平台的概括。天津大学研究团队开发的多飞行器编队仿真平台,由模型计算机、系统主控计算机、视景显示计算机、PC104控制器、无线AP/路由器以及Wi-Fi无线通信模块组成。模型计算机采用xPC仿真环境,运行单飞行器动力学以及环境模型;系统主控计算机发出任务指令,并监控整个系统的运行;视景显示计算机实时地进行视景显示;PC104控制器运行飞行控制算法,实现对单飞行器的控制;无线AP/路由器作为系统无线网络的中转站,实现信息交换;Wi-Fi无线通信模块使有线通信方式转为无线连接。实现了对于多飞行器编队系统的实时仿真、视景显示、算法验证、通信组网等功能. 该团队突破了xPC平台和dSPACE平台两项关键技术, 实现了对于多无人机编队飞行控制算法的半实物仿真验证与性能评估。此类平台灵活度较大,可以有效对协同控制算法和轨迹优化算法进行仿真验证,但内部通信机制和管理机制的搭建,需要自主研发,具有一定难度。
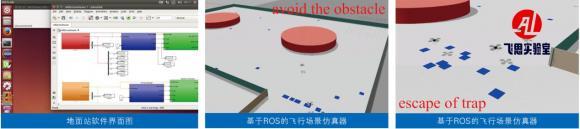
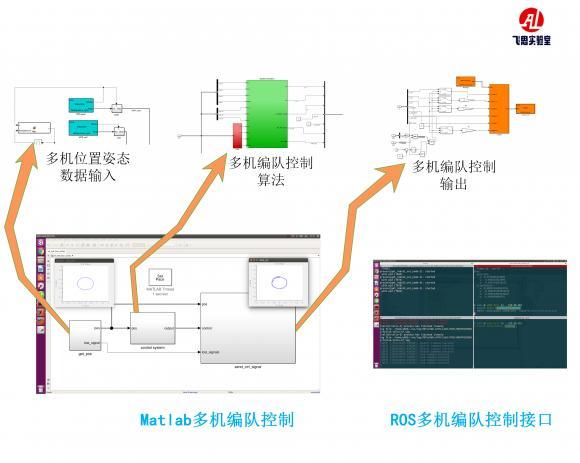
整自主开发的多无人机编队分布实物系统仿真平台,整个系统由室内定位系统、多无人机、ZigBee无线传输以及地面站组成。首先室内定位系统借助红外摄像头对各无人机上的标记点进行抓拍,通过解算实时地计算出每架无人机的当前位置,并以TCP/IP协议的方式传送给地面站;地面站借助ROS通信机制,在接收定位系统数据的同时运行相关决策算法,计算出每架无人机下一时刻的期望位置,并通过ZigBee无线通信发送出去;无人机通讯网络以分布式、自组网的形式进行搭建,每架无人机均可与地面站通信,同时彼此间也可以进行数据交互;各无人机接收地面站传来的数据,提取自身当前位置与期望位置,运行机载控制算法,驱动无人机运动到设定的位置,如此循环往复,最终实现多无人机编队飞行的仿真验证。目前该平台已突破XBEE分布式网络和PIXHAWK开源飞控两项关键技术,并成功嵌入人工势场法、图论法等编队理论算法。在室内也已实现定点、直线、圆等常用队形演示,同时在飞行过程中可实时对无人机编队进行队形切换. 该平台可以为多无人机飞行过程算法提供数据支持,并可以直接充当演示效果。所以,该平台可以很好的为理论研究服务,避免不必要的经费投入。
正如,飞思实验室研发的这款基于室内光学定位系统的室内多旋翼控制平台,不仅实现了室内无人机集群飞行、集群算法、编队通信原理等教学实验,能够更有效的帮助教研工作者,专注于无人机多机协同编队等无人机集群关键技术研究,检验理论成果,提升实验效率,更能大大推动教学研一体化进程,加速教学、科研的进度。而且它是基于Matlab或ROS的飞行场景仿真器可较真实模拟真实飞行器的动态,并且可模拟节点通讯方式,方便后续仿真。Matlab或ROS的地面控制站可实时读取基于ROS的飞行场景仿真器、光学室内定位系统节点,还能读写真实多旋翼飞行器节点,从而能够在Matlab或ROS平台下统一地从仿真到真实实验,最终轻松完成多旋翼飞行器的控制。

可开设课程多样化:
多旋翼滤波器设计;
多旋翼定点位置控制器设计;
多旋翼路径跟随控制器设计;
多旋翼跟踪控制器设计;
多旋翼避障控制器设计;
多旋翼区域覆盖决策设计;
多机编队控制设计;
多机投递决策设计。
系统组成:
光学室内定位系统多旋翼飞行器
基于Matlab或ROS的编队控制站
实验指导包(指导书、视频、例程)

系统特点:
平台统一,高效易用,强势助力科研
身材Mini续航久,与平台完美兼容
权威教科书级指导,制定行业标准
视频和例程由浅入深,轻松上手
结论与展望
通过对近年来国内外多无人机协同编队飞行控制几个关键技术的进展的综述,同时展望了每种关键技术发展趋势,具体得出以下结论:
1)现有的任务分配和航迹规划主要针对离线无人机编队任务分配和航迹规划展开研究,未来研究应围绕复杂环境及有限通信环境下的无人机编队实时任务分配和多异构无人机编队实时协同航迹规划展开。
2)多无人机编队飞行的控制方法大部分实现了2维编队,对于3维立体编队的编队控制策略研究很少。如何综合利用各种编队控制方法的优点,实现多无人机在复杂环境和突发情况下的编队形成、保持与重构,是未来研究者所要追寻的目标。
3)针对无人机多传感器数据融合问题的研究与实现主要停留在单个无人机携带的多传感器进行数据融合,而对多无人机编队所携带的多传感器数据融合问题的研究较少,且大多停留在理论与算法研究上。如何通过合理利用多无人机编队的多传感器进行协同感知,扩大感知范围,提升感知精度,是未来多无人机编队需要研究重点问题。
4)编队间的通信研究都是针对某一性能进行的改进,仍停留在理论层面,没有应用在实际工程中;未来需要结合现有移动自组网技术建立通信标准构建无人机自组织网络,实现无人机与其他平台的互联互通。
5)仿真平台大部分是对已有算法的仿真和验证,对多无人机编队飞行实物演示验证较少。编队仿真平台应以分布式结构为主流,针对实物硬件及虚拟软件环境进行系统集成,推动并简化计算,以便更好地适应多核技术迅速发展的背景。
总之,多无人机协同编队飞行控制的理论虽然取得了丰富成果,但是随着环境日益复杂和任务的多种多样,各种多无人机协同编队飞行关键技术也需要迅速发展。未来会出现异构多无人机之间的协同编队,并且通信环境会异常复杂,感知约束也会随环境的复杂而增大,迫切需要开展在感知约束和复杂通信环境下的强鲁棒、高精度编队控制设计研究。















