但如果无人机能够自动驾驶,避开航线,避开树木,未来我们只需要告诉它去哪里,它们就可以自动规划路线安全的抵达,也许这些都不会发生。但要实现这个目标,又存在着很多难题。
首先无人机一般的作业环境比较复杂,需要较强的自动避障能力
目前商用领域无人机的使用量越来越大,但无人机的工作场景一般都在 30 米以下的低空,这种高度架空电缆、树、建筑等都是主要的障碍物,并且障碍物极多。比如,新疆是植保无人机的主要市场之一,因为风沙较大,所以农田间有很多条防风林带。无人机在林带中喷洒药品的过程中会与树木发生近距离接触,不论是飞跃防护林,还是绕过、贴着防护林飞行,都需要有一个避障系统保证安全,否则无人机很有可能会发生撞击,造成损失。
所以植保无人机目前有两种模式:一是飞手直接操作,飞机在飞手完全的掌控之下。飞手通过良好的观测角度和操作直接绕开障碍物,完成预计飞行任务;另外一种是通过RTK信号装置,移动端或PC端上设置好路线后,飞机自动完成循迹飞行,在飞行的过程中如果在既定路线上发现障碍物,要通过避障系统自动绕开障碍物。
自动飞行逐渐成为主流,因为可以节省人力,大批量操作,喷药又均匀,受人为影响出现故障的概率小。但在方案普及的同时,无人机在飞行中如何避障,安全稳定的完成整个作业任务,并不容易。
其次,各种避障方案众多,要选出最有价值的解决方案
因为避障的首要任务是建立3D感知体系,这样才能直观的感受到周边是否存在障碍物。
第一代的,无人机避障方式主要为“飞行时间 (Time of Flight, TOF) ”,无人机通过发射激光/红外线/超声波等,射向物体,然后计算电波反射到传感器的时差,估算障碍与自己的距离,但这种方法感知范围狭窄、距离也不够远。
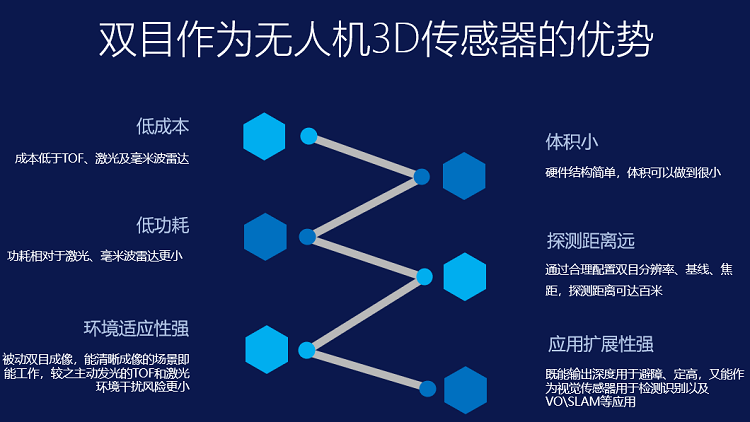
但第二代双目视觉方案,基于计算机视觉,所能:改用透过双目摄影机或结构光的造成的视差(Parallax)(上图),进行即时的三维建模,判定障碍物与无人机之间的距离。

但常见的红外和超声波目前都是单点测距,只能获得特定方向上的距离数据,而双目视觉可以在小体积、低功耗的前提下,获得眼前场景的比较高分辨率的深度图,这就让避障功能有了更多的发展空间,比如避障之后的智能飞行、路径规划、对农作物的生长情况,病虫害等情况进行视觉提取与分析。
最后,虽然确定了双目的解决方案,找到一个靠谱产品也并不容易
在无人机领域想要达到自动驾驶的效果,需要选择一款经得住市场检验的双目视觉产品。人加智能司眸TM立体AI摄像机目前已经和农业植保领域的龙头企业展开深度合作,从市场上看是无人机领域唯一一款量产的商用级立体AI摄像机,并且已经签并交付订数千台订单。

人加智能司眸TM立体AI摄像机独特的三大优势:
1.算力优势:使用FPGA运算平台、独特的算法设计方法学对积累了很久的双目算法进行了工程化和改进克服了算力的瓶颈。
2.稳定性优势:人加智能立体AI摄像机,采用低光鲁棒立体匹配技术、环境自适应去燥技术、夜间红外照明技术。可以在全天候,高干扰环境下做出清晰高品质的视觉识别效果。除此之外,人加智能独特的算法,可以让立体摄像机夜间也具备极佳的成像效果。
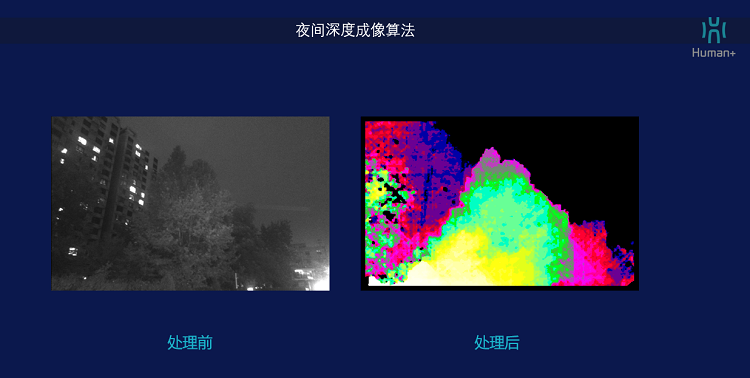
夜间深度图
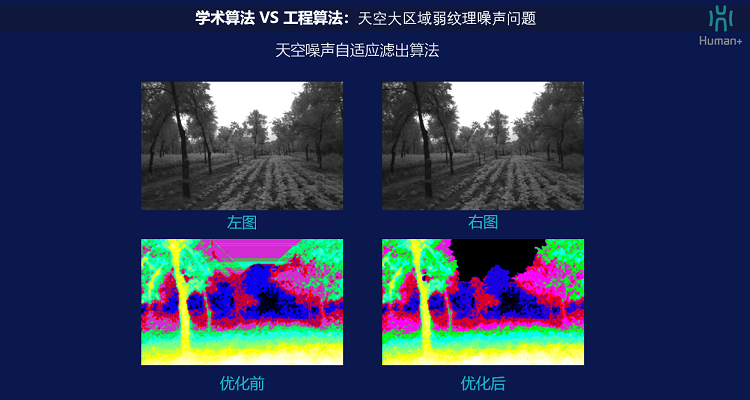
3.飞行状态算法优化:行业级无人机需要对细杆、斜向电线等障碍物进行识别,并且飞行过程会实时受到天空噪声干扰。人加智能的算法能对此类噪声进行抑制,同时对于小面积弱纹理又能保持比较好的效果。
人加智能目前的立体AI摄像机解决方案,不仅能在效率上比传统的方法提高数倍,还能达到高精度、边缘计算、高可靠性等高品质效果。
未来无人机领域要想让人们在后台便捷的操作,实现“自动驾驶”、“自动避障”的理想效果,基本上会成为以双目为主,附加低价传感器的多场景融合方案,但这个愿景还需要行业共同努力。人加智能的使命是让机器为人赋能,让人能力最大化。在这个使命的激励下,人加智能怀着开放的心态、期待用自己的智能方案,和合作伙伴一起帮助一个又一个行业完成智能化的转型与升级,让智慧生活来到我们的身边。















