前 言
本标准按照GB/T 1.1-2009给出的规则起草。
本标准由中国民用航空局飞行标准司提出。
本标准由中国民用航空局航空器适航审定司批准立项。
本标准由中国民航科学技术研究院归口。
本标准负责起草单位:中国民航科学技术研究院、XXXX。
本标准主要起草人:
无人机围栏
1 范围
本标准规定了无人机围栏的范围、类型与参数、标识、标记和试验要求等。
本标准适用于无人机系统和无人机云系统中的无人机围栏。
2 规范性引用文件
下列文件对于本文件的应用是必不可少的。凡是注日期的引用文件,仅所注日期的版本适用于本文件。凡是不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
AC-91-FS-2015-31 轻小无人机运行规定(试行)
MH/T****** 无人机云系统数据接口规范
3 术语、定义和缩略语
3.1 术语与定义
下列术语和定义适用于本文件。
3.1.1
无人机 unmanned aircraft
由控制站管理(包括远程操纵或自主飞行)的航空器,也称远程驾驶航空器(RPA: Remotely Piloted Aircraft)。
3.1.2
控制站 remote pilot station
无人机系统的组成部分,包括用于操纵无人机的设备。也称遥控站、地面站。
3.1.3
无人机系统 unmanned aircraft system
从事民用领域飞行活动的无机载驾驶员操纵的航空器、控制站、数据链、任务载荷、保障与维护等组成的系统。
3.1.4
无人机云系统 unmanned aircraft cloud system
轻小型民用无人机运行动态数据库系统,用于向无人机用户提供航行服务、气象服务等,对民用无人机运行数据(包括运营信息、位置、高度和速度等)进行实时监测。简称无人机云。
3.1.5
无人机围栏 fence of unmanned aircraft system
为阻挡即将侵入特定区域的航空器,在相应电子地理范围中画出特定区域,并配合飞行控制系统、保障区域安全的软硬件系统。
3.2 缩略语
下列缩略语适用于本文件。
UTC:协调世界时(Coordinated Universal Time)
LBS:位置服务(Location-Based Service)
4 无人机围栏模型说明
4.1 无人机围栏模型
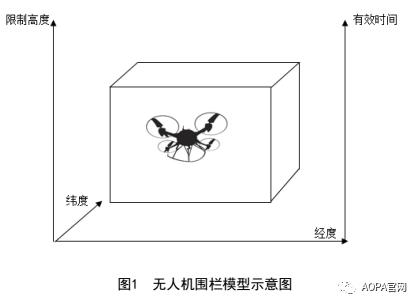
无人机围栏模型采用4 维空间结构如图1 所示,包括:
——平面地理区域,包括:
•经度;
•纬度;
——限制高度;
——有效时间。
4.2 无人机围栏模型
4.2.1 无人机围栏分类
无人机围栏模型按照其在水平面投影几何形状可以分为以下三种:
——民用航空机场障碍物限制面;
——扇区形;
——多边形。
无人机围栏所使用的经度和纬度坐标点,均为WGS84坐标。
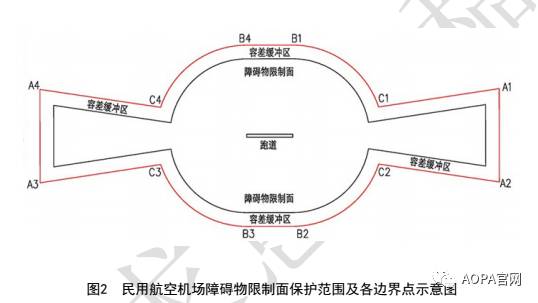
4.2.2 民用航空机场障碍物限制面几何模型
民用航空机场障碍物限制面如图2所示。民用航空机场障碍物限制面保护范围为图2中A1-A2-C2-弧C2B2-B2-B3-弧B3C3-C3-A3-A4-C4-弧C4B4-B4-B1-弧B1C1-C1-A1各点坐标、圆弧连线范围内;圆弧半径均为7 070 m。这些面的顶面高度(相对高度)均为120 m。图2中红色多边形连线范围即民用航空机场障碍物限制保护范围。
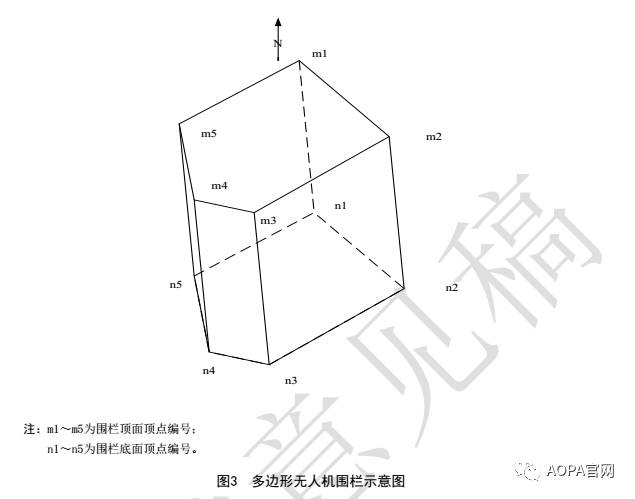
4.2.3 多边形无人机围栏空间几何模型
多边形无人机围栏空间几何模型由不同海拔高度的底面和顶面组成的立方体构成,示意图见图3所示。空间几何模型的一个面是由同一平面上的N个空间点构成的闭合的空间区域,空间点以真北为起点,在水平面上按顺时针依次命名。顶点顺序为顺时针方向。构成顶面和底面的顶点数量相等。
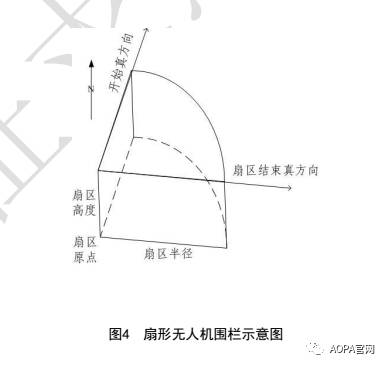
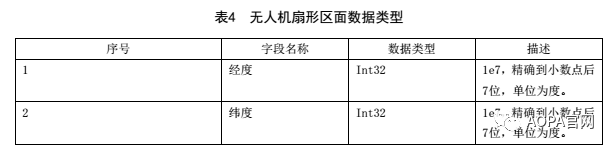
4.2.4 扇区形无人机围栏空间几何模型
4.2.4.1 扇区形无人机围栏空间几何模型是由不同海拔高度的扇区形底面和顶面组成的立方体构成,示意图见图 4 所示。一个空间的扇区面由同一平面上的扇区原点,扇区半径,扇区起止方位角(扇区开始真方向和扇区结束真方向)构成的闭合的空间区域。
4.2.4.2扇区原点由该地理点的经纬度定义。
4.2.4.3扇区半径以扇区原点为圆心,距离单位为米。
4.2.4.4扇区起止方位是该扇区开始和结束的真方向。
4.2.4.5扇区高度是禁止进入该区域的相对高度范围。
4.3 无人机围栏有效时间
无人机围栏所采用的时间为UTC时间。无人机围栏的有效时间是指禁止无人机在该空间范围里飞行的时间段(包括起始时间和结束时间),有效时间可以是多组时间段。每个无人机围栏均有有效时间。其中:
a)无人机围栏起始时间使用 UTC 时间,格式为 UTC YYYYMMDD TTMM,永久有效的无人机围栏在起始时间UTC 后标注 NONE;示例:UTC 20170101 1200
b)无人机围栏终止时间使用 UTC 时间,格式为 UTC YYYYMMDD TTMM,永久有效的无人机围栏在终止时间 UTC 后标注 9999。示例:UTC 20170111 2400
5 无人机围栏模型元数据数据结构说明
5.1 数据类型说明
5.1.1 基本数据类型说明
见表1。

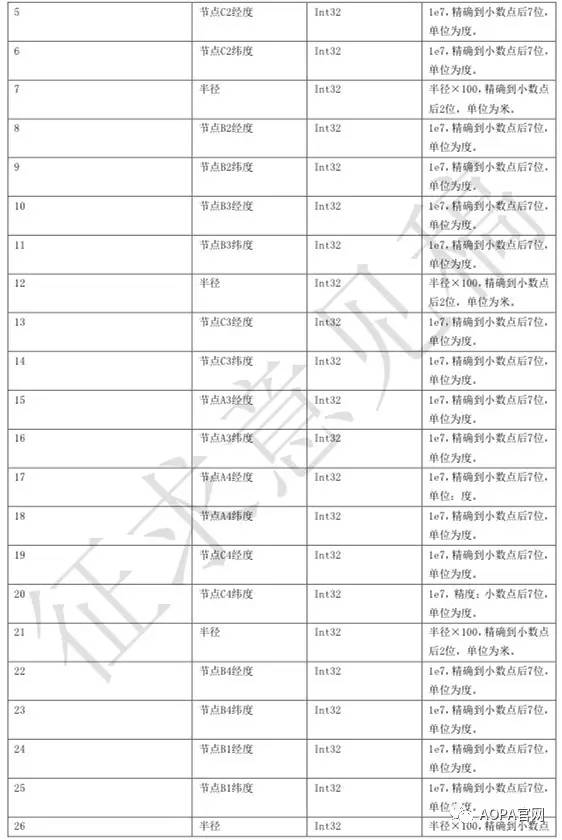
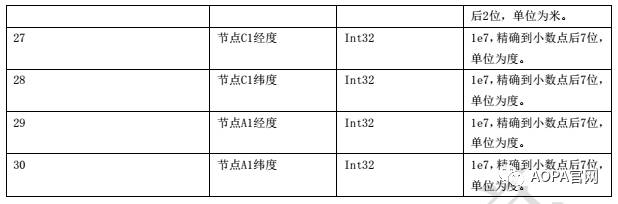
5.1.2 民用航空机场障碍物限制面数据类型说明
民用航空机场障碍物限制面几何模型数据类型采用A表示,其数据结构如表2所示:
表2 民用航空机场障碍物限制面数据类型说明

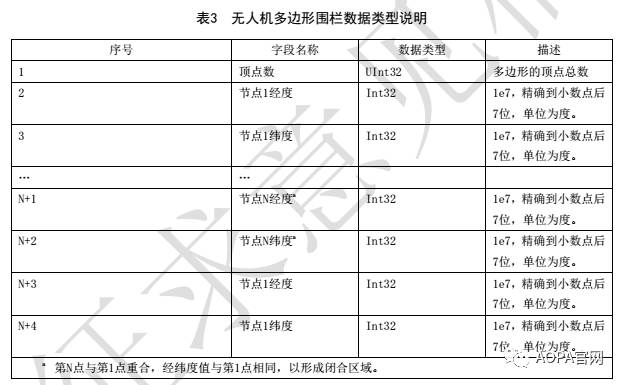
5.1.3 多边形面数据类型说明
多边形面数据类型采用P表示,其数据结构如表3所示:
5.1.4 扇形区面数据类型说明
扇形区面数据类型采用S表示,其数据结构如表4所示:
5.1.5 空间几何坐标系说明
无人机围栏的空间几何坐标系采用WGS-84坐标系,其中经度和纬度单位为度;北纬为正,南纬为负;东经为正,西经为负。
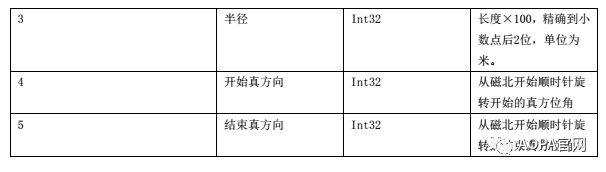
5.1.6 有效时间数据类型说明
无人机围栏的时间系统采用UTC时间。一个无人机围栏对象的有效时间表示无人机在该空间区域不允许飞行的时间域,数据类型采用T表示,一个时间域由开始时间和结束时间组成,一个无人机围栏对象有效时间由多个时间域组成。
无人机围栏对象有效时间(T)数据结构如表5所示:
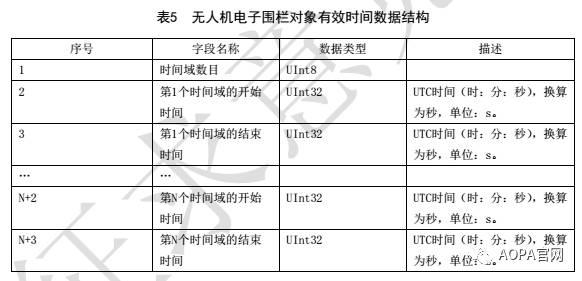
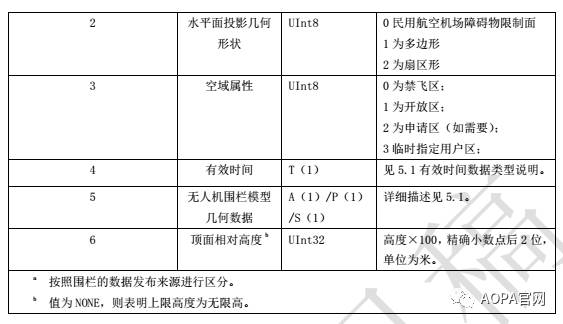
5.2 无人机围栏元数据数据结构说明
无人机围栏数据库是由分布在全国各地的无人机围栏的元数据组成,无人机围栏对象的元数据数据结构见表6。
6 性能要求
无人机系统与 MH/TXXXX 的要求,包括数据项、实时响应频率等。接入无人机云系统的无人机系统应即时上传飞行数据,无人机云系统对侵入无人机围栏的无人机系统具有报警功能。
测试环境应满足 AC-91-FS-2015-31 中对无人机系统和无人机云系统运行和通讯的要求。
7 无人机围栏测试
7.1 技术要求
7.1.1在无人机系统与云系统数据连接中,检查无人机云系统和无人机系统中获取的数据,确定满足 MH/TXXXX 的要求,显示正确,数据的实时更新率满足 AC-91-FS-2015-31 中 14.1.2 a 款和 b 款的要求。 7.1.2 在各种运行环境下测试飞行无人机接近或侵入无人机围栏时,无人机系统和无人机云系统均应具备触发提示、警示和警告等方面的功能。
7.2 测试方法
7.2.1 无人机系统的无人机围栏测试
7.2.1.1 检测需在符合条件的飞行检测基地进行。
7.2.1.2 无人机围栏检测机构的系统中将飞行检测基地飞行测试空域设置成禁止飞入的无人机围栏,按照时间和距离 2 个指标进行测试。
7.2.2 无人机云系统的无人机围栏测试
7.2.2.1 应对无人机云系统的无人机围栏进行测试。
7.2.2.2 已通过检测合格的无人机在指定空域或临时划设的无人机围栏区域内飞行,对无人机接近和侵入无人机围栏时,无人机云系统触发各种提示或警示等功能进行测试。
8 无人机围栏验和试验项目的要求
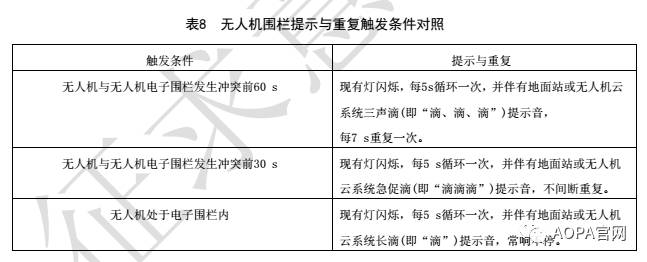
在无人机围栏使用前需对无人机和无人机云系统进行测试,逐项检查无人机和无人机云系统是否满足相应要求。测试项目如表7所示,无人机电子围栏提示与重复触发条件如表8所示: