SLAM(simultaneous localization and mapping),即时定位与地图构建。利用SLAM技术,可以让机器人在未知的环境里实时地知道自己在哪里,并同步绘制环境地图。在机器人的定位、跟踪和路径规划技术中,SLAM都扮演了核心角色。没有SLAM的机器人就好比在移动互联网时代不能上网的智能手机,发挥不了重要作用。非要向不了解SLAM的人简单地描述SLAM的一个应用场景的话,扫地机器人应该就是用来解释的最佳神器。
从图中我们可以看出,扫地机器人能将其所经过的区域绘制成地图,规划清扫路径,从而进行清扫。这种即时定位与地图构建技术,就是我们所说的SLAM技术。要利用SLAM技术,首先需要机器人配置至少一个测距装置,通过测距装置获取机器人周围环境的信息。目前比较常见的测距装置主要有激光测距、超声波测距和图像测距。

|
|
激光测距 |
超声波测距 |
图像测距 |
|
优点 |
测量精度高、效率高、输出不需要太多数据处理 |
水下穿透力强、价格便宜 |
模仿人类思考,可获得更多信息, |
|
缺点 |
价格比较昂贵、不能水下测量、测距玻璃无效 |
测量精度低 |
输出需要大量计算,较暗的房间内无法使用 |
由表可见,使用激光测距方法进行距离测量,可获取较高的空间定位精度,且运算要求较低。这样的特性使得激光测距可以很容易地应用到SLAM中。为方便大家理解,接下来我们将以二维空间的激光定位技术来解释SLAM技术应用的具体过程。
|
|
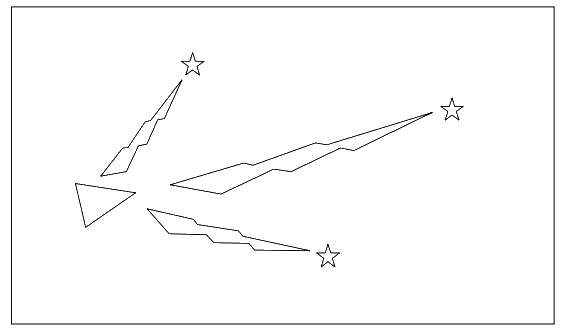
左图中三角形表示机器人,星号表示路标;机器人首先使用测距装置测量地标相对于机器人的距离和角度。 |
|
|
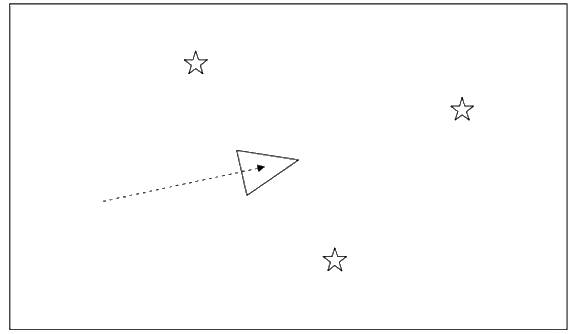
接着,机器人开始进行运动,到达一个新的位置。根据运动方程,机器人可预测其当前所处的新位置。 |
|
|
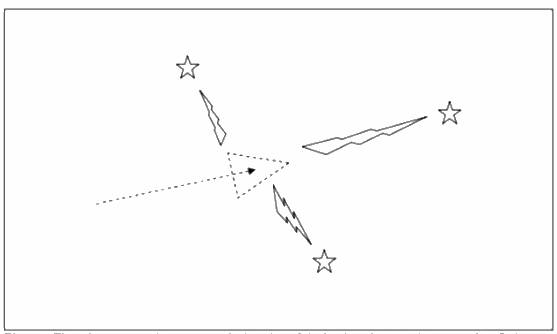
在新的位置,机器人通过测距装备重新测量各个地标相对其自身的距离和角度。 |
|
(虚线为第一步中通过运动信息预测的机器人位置) |
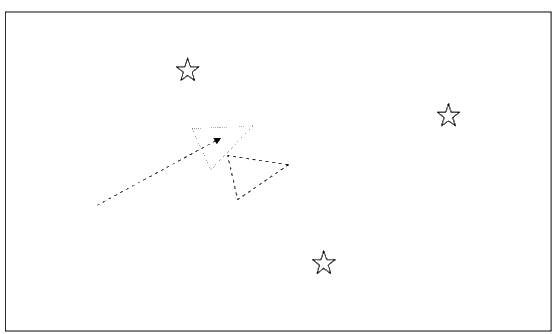
由于通过传感器获得的信息相对于通过运动方程得到的信息更为准确,机器人将利用通过传感器获得的数据更新对自身位置的预测值。 |
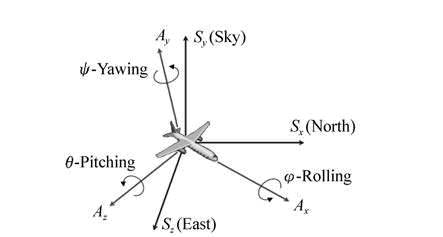
上面我们所看到的,是SLAM在二维空间中的应用。这个时候它只有3个变量:x轴、y轴和方向角。可在三维世界里,它却有6个变量,除3个位置要素x、y、z外还有3个姿态要素roll(横滚角)、yaw(旋偏角)、pitch(俯仰角),导致相应的计算量增加了不少,但原理是一样的。
一位大疆无人机工程师曾坦率承认:“所有的关于无人机的梦想都建立在Slam之上,这是无人机能飞(具有定位,姿态确定以后)的时代以后,无人机最核心的技术。”

Phantom 4 Pro无人机的主动避障功能就是一种非常典型的SLAM应用。这套避障系统由6个视觉传感器、2组红外传感器、1组超声波传感器、GPS/GLONASS双模卫星定位系统、IMU和指南针传感器、主相机和计算内核组成。在飞行中,Phantom 4 Pro通过这些传感器获取实时图像、深度、定位等信息,构建飞行器周围的三维地图并确定自己的位置。

继大疆之后,5月即将进驻苹果零售店及官方网站的Hover Camera小黑侠无人机,也采用了SLAM技术。Hover Camera前置摄像头拍摄的视频流将分为三路处理,一路保存到机身的存储器上,一路以720p的码流传输到手机上进行视频预览,另一路用来做SLAM定位、建模和人脸识别运算。机身底部还配有一颗光流摄像头,通过持续对地面摄像,判断无人机位置是否发生了移动。底部的声呐模块,则用来判断飞行的高度。

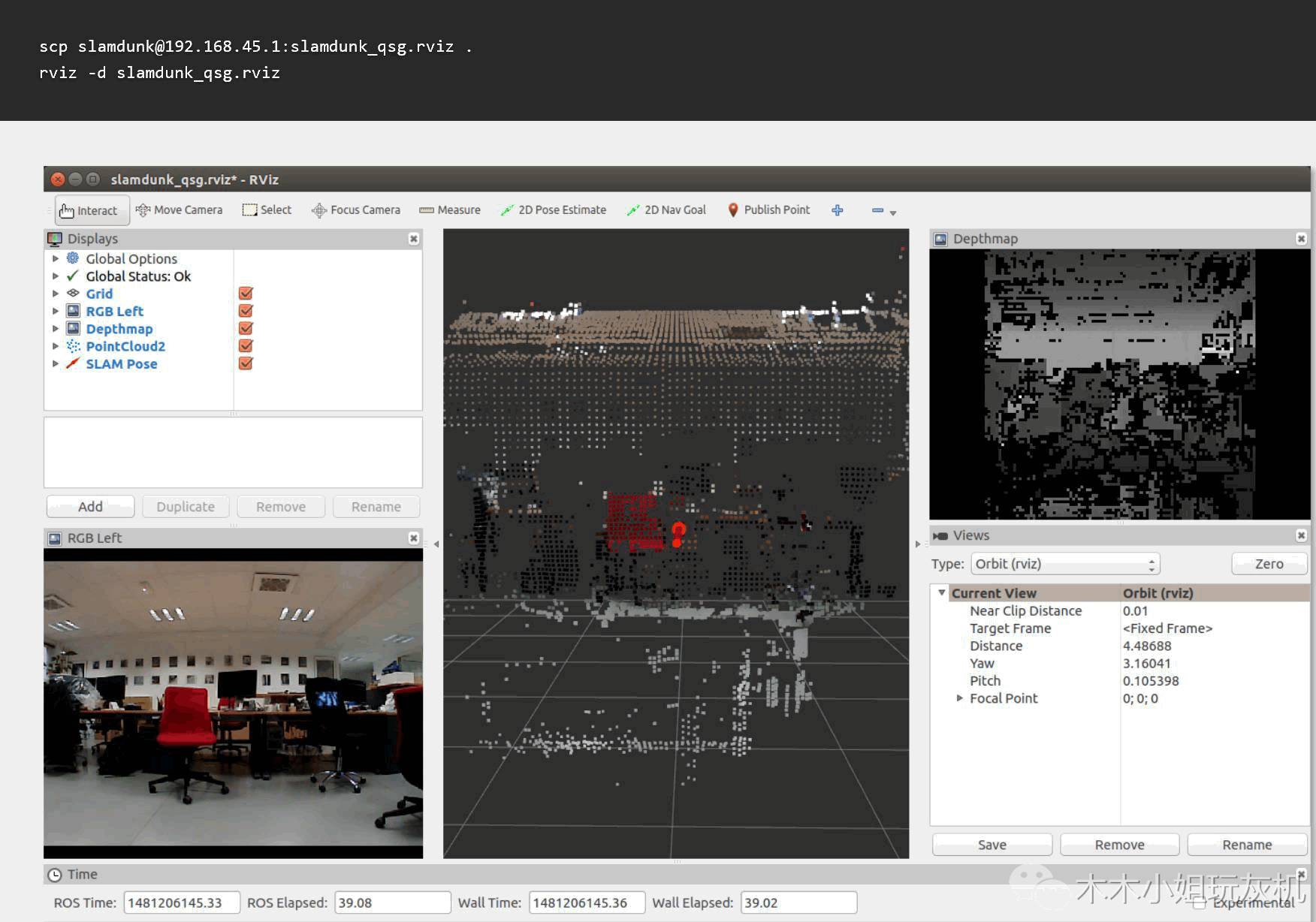
世界知名的无人机创新公司Parrot,甚至专门推出了ParrotS.L.A.M.dunk套装,用于机器人和无人机的深度开发,同时还开放了SDK,便于更多的开发者调用接口。感兴趣的机友可以登陆Parrot开发者论坛,查看详细资料。

未来,拥有成熟SLAM技术的无人飞行器又会发挥怎样的作用?下面一段视频将给我们带来无限遐想。