在无人机领域双目视觉已经成为一种极其有价值的应用。它可以辅助无人机更快更好地识别周围场景,便于它的飞行与避障。目前应用双目视觉的无人机并不是很多,大疆推出了一款机型:精灵Phantom 4的亮点就是它的双目视觉识别以及基于这个原理的自动避障功能。

双目视觉是啥?跟人眼一样
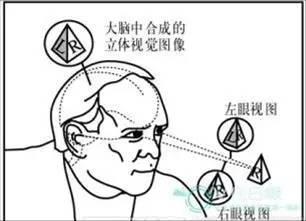
双目立体视觉(Binocular Stereo Vision)是基于视差原理的机器视觉的一种重要形式,它利用成像设备从不同的位置获取被测物体的两幅图像,通过计算图像对应点间的位置偏差,来获取物体三维几何信息和摄像头与所测物体间的距离。

上面的原理介绍是不是有些深奥呢?其实简单来说双目视觉就是利用两个摄像头仿制出人眼双目的效果,通过相关算法在计算机中描绘出大脑处理后的画面。我们能够通过这个技术,得到与所测目标之间的距离,得到目标的三维信息。
那这些信息怎么就和无人机自动避障联系到一起呢?我们的双眼已经能实现这些,这个技术还有什么用呢?
我们的大脑虽然能够完美的处理看到的图像,可是计算机没有这么强的功能。这项技术的关键是得到计算机可以识别的位置信息,这些信息是无人机实现自动避障的根本。换言之,双目视觉技术已经成为无人机自动避障不可或缺的必要保证。
如何实现无人机避障
对运动物体(包括动物和人体形体)测量中,双目立体视觉系统是计算机视觉的关键技术之一,获取空间三维场景的距离信息也是计算机视觉研究中最基础的内容。
无人机避障的实现是通过将探测所得结果数据导入到自身避障模块,经过计算机的运算,得出避障飞行的指令。在避障模块相同的情况下,得到的信息就对避障效果起到了决定性的影响。

不同的探测技术会使无人机的避障能力有着截然不同的变化
红外或激光测距是目前应用最为广泛的无人机探测技术,但是由于它是通过信号来计算,因此很容易受到外界因素的干扰,用于自动避障的功能并不是很合适;而双目视觉技术则不会收到太大的外界干扰,因此虽然该技术的难度较高,但是已经开始逐渐应用到无人机避障技术中来。
双目立体视觉测量方法具有效率高、精度合适、系统结构简单、成本低等优点,非常适合于制造现场的在线、非接触产品检测和质量控制。只有高精度的、易于处理的信息,才能在无人机避障上广泛应用。

图为应用双目视觉的机器人
这么好的技术为啥不能实现全向避障呢?
双目识别虽然有着极为强大的功能,但仍然有一定的局限性。目前对于基于双目视觉进行全向避障仍然较难实现。原因有二:一是由于转过90°后的两个视觉接收系统对于边界点的处理会出现重合的情况,导致运算结果有偏差以至于报错;二是因为不同角度的噪声干扰不同,无法同步实现数据处理。简单来说,无人机只能像人眼一样,看到前方事物,对身后的东西也会无能为力。
换个方式说:咱们人类经过千百万年的进化,就进化出了两只眼睛,走路不也不会撞树上?















