实现无人机智能化需要在硬件和软件两个方面进行技术升级。
硬件方面需要引入机器视觉硬件技术 ;
软件方面则需要做好机器视觉软件技术,人工智能技术和OS,飞控,导航等其他必要软件技术。
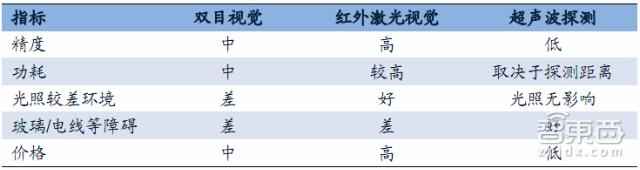
1.机器视觉硬件技术主要包含三类:
2.机器视觉软件技术目前有两类算法:
光流算法:光流算法是一种单摄像机视觉技术,完全依赖软件算法解决了运动检测和定位问题。光流法通过比较同一摄像机两张相邻时间的图像(差分运算)得到场景中不同物体运动的光流场。
优点在于其主要依赖软件和计算能力识别物体和距离,因此对额外的光学和声学硬件需求小,更能节省成本。但其缺点在于精度低,且局限性较大(不适用于照明不良的室内,玻璃,细小的电线)。腾讯发布的空影无人机采用了单摄像头光流算法完成障碍探测,并依靠超声波辅助避障。

图像分割算法:边缘检测是一种应用广泛的图像分割算法,其原理是先对图像的灰度函数求导,再根据静态或动态的阈值设定检测出物体的边缘。
各类边缘检测算法的共同特征是对计算要求非常高。例如高通实现的双目深度摄像解决方案中,需要单独使用骁龙801多核芯片中的一个核运行专门的SIMD(Single instruction, multiple data, 单指令多数据)运算,并仅能提供30Hz的实时运算能力。对于飞行速度可高达20m/s的四轴无人机而言,这一频率意味着两次识别期间无人机已经飞过了0.66m,将不能对环境中突然出现的一些物体及时反应。

3.人工智能方面主要包含图像识别算法,人脸识别算法和语音语义识别算法 。这样可以使无人机能够完成更多功能,如对电力设备上的特定部件扫描检查;按照人类指令讲特定物体(橘子而不是香蕉)抓取并飞行到另一房间;在边境巡逻时区分普通动物还是可疑人形目标,并及时报警;通过操作者的声音进行飞行控制等。
与图像分割算法不同的是, 以神经网络为基础的图像识别/人脸识别/语音识别算法计算量根据使用场景差异较大。
4.智能无人机软件技术还包括:飞行控制、导航与路径规划、以及支撑所有智能软件的操作系统。此外智能无人机还需要一些底层的固件代码连接硬件和软件系统,保障通讯、传感器、计算单元正常高效运行。对于智能无人机开发厂商而言,独立开发如此繁杂、涉及领域各异的软件实属“重新发明轮子”类工作,在开源软件项目上根据需求定制加工能够加速产品迭代,减少开发成本。
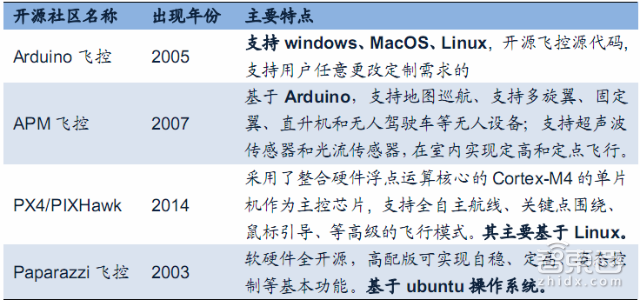
在无人机领域最早出现开源项目是无人机的飞控软件领域,目前流行的开源无人机飞控(包含软硬件)如下。
5.芯片方面,在现有的无人机上,主流厂商使用的是ARM架构MCU(Micro controller Unit)芯片, 例如意法半导体的STM32系列 (大疆精灵系列无人机采用) , Atmel的Mega2560系列等芯片,这类芯片的特点是:主频低(STM32主频在200M Hz左右,Atmel的MCU低至20M Hz),计算能力较差,往往只能支持飞行控制功能,并不能提供无人机智能化所需要的高速计算和并行计算能力。
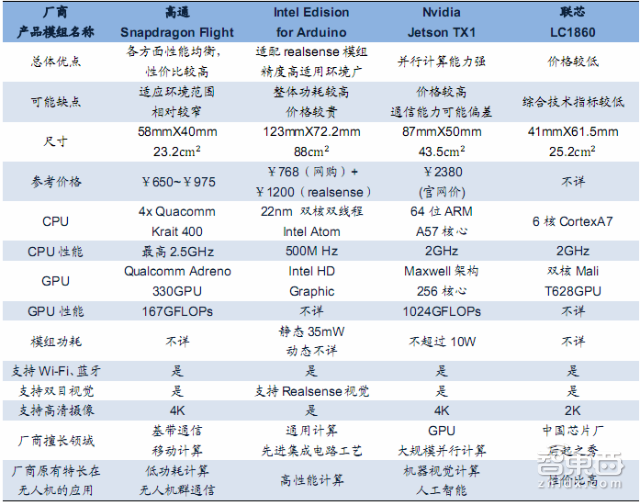
目前芯片业界三大巨头:高通/Intel/Nvidia都纷纷挺进这一产业,推出以自己的移动芯片或图形计算芯片为核心的无人机参考设计或套件;此外中国芯片设计厂商联芯科技也与中国无人机厂商零度智控联合开发了用于智能无人机的方案。
高通推出了Snapdragon Flight参考设计;
Intel推出了Edison for Arduino开源硬件飞控参考设计板;
Nvidia推出Jetson TX1无人机与机器人芯片模组方案;
联芯推出的基于LC1860无人机飞控;
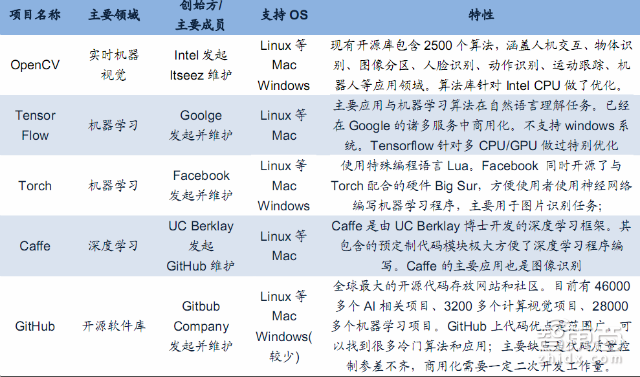
6.开源工具方面,在机器视觉、人工智能等领域, 存在着很多开源软件项目与开源软件库。
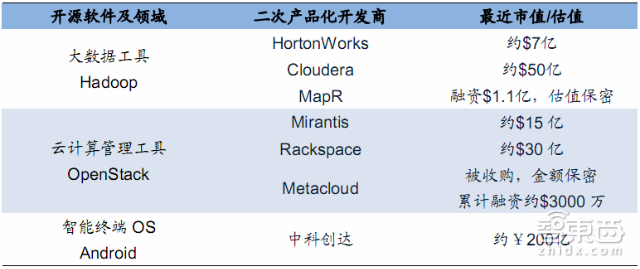
根据开源软件产业的发展历史,我们判断未来在无人机智能软件领域会涌现出一批软件产品化二次开发商,在开源的机器视觉和人工智能软件基础上进行开发工作,销售封装好的成熟可用智能软件产品及配套接口给下游的无人机整机厂商。
大疆已然占据了大片民用无人机市场,然而无人机开发的门槛不够高导致整个行业参与者众多,竞争仍然十分激烈。
在创新这条路上,你不主动思考,总有人从各个方向向你逼近。不是大疆不努力,但终端智能化这个趋势显而易见,时机一到,各家出手。















