






TOP6 无人机系统模块开发设计与仿真
在开发的早期阶段,开发一个硬件在环(HIL)测试环境来测试无人机GNC解决方案。HIL测试环境是软件仿真和飞机实验的一个中间步骤,对于无人机GNC软件的开发过程非常关键。通过HIL环境,工程师可以在一个可控的仿真环境中对无人机软件进行测试。同时,它也能加速设计,缩短开发周期,通过HIL环境,工程师可以发觉软件仿真(主要是同步和定时)中没有出现的问题,从而避免现场试验的故障,并增加无人机团队的安全性。开发了一个通用的 HIL平台来设计验证控制和导航算法。这个HIL测试环境完全集成在一个基于模型的设计开发周期中(见图1)。

图1 : HWIL测试环境示意图
基于模型的开发
首先我们设计编改了无人机平台,将其用于仿真,并将控制器和算法部署至硬件中。根据基于模型的设计理念来完成这个任务。对于系统设计和仿真来说这是一个可靠方便的方法。使用代码自动生成工具可以使我们减少设计时间,轻松完成对于测试架构的重复利用,以及快速系统原型,从而形成一个连续的确认和验证过程。
构架的目的包括:在不同的硬件平台上不用任何改变即可对模型重复利用;对设计测试套件模型进行重复使用以验证目标系统;将透明模型完全集成到目标硬件中,并创建一个系统的,快速的流程,将自动生成的代码集成到目标硬件,从而使得控制工程师无需软件工程师的参与,即可以快速测试模型(见图2)。对于这个项目,使用Simulink®公司的MathWorks软件(我们还使用了Esterel Technologies公司的SCADE套件)开发了模型任务,并使用MathWorks和Real-Time Workshop®公司的软件实现自动编码。需要两次不同的编改:在无人机中进行测试及执行的算法是由ANSI C代码编写的,仿真无人机动态行为的数学模型将通过LabVIEW仿真接口工具包转换至NI LabVIEW软件动态库中。
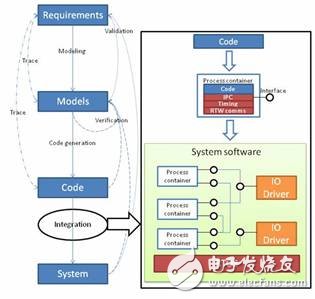
图2: 基于模型的开发流程
在最终的系统中,我们使用多个LabVIEW I/O模块来仿真一些无人机航空电子和逻辑传感器以及激励器接口。
LabVIEW Real-Time PXI
PXI 是一个基于PC的平台,可用于测试,测量和控制,能够在不同的接口和总线中提供高带宽和超低的执行延时。在这个案例中,PXI需要在一个复杂的无人机模型中运行,该模型会在实时中以动态库的形式被执行。 在系统中使用PXI模块能让我们使用无人机上完全一样的接口进行HIL仿真。所以,我们会以现场实验完全相同的配置验证GNC算法处理单元。这对于一些使用纯仿真不足以捕捉所有硬件相关问题(例如信号噪音,错误和同步问题)的系统来说是十分重要的。通过Spirent GSS8000 GPS仿真器,我们能够仿真并生成用户选择的GNSS星座卫星所发出的相同的射频信号。这些信号会以飞行实验相同的方式传送到无人机上真实的GPS传感器,并能仿真惯性传感器(加速度计和回转仪)。可以指定不同的情况,降级信号,指定天线模式及模拟IMU传感器错误。

图3:实验中使用的基于CB5000 RC直升机改装而成的无人机
板载处理单元
在实时操作系统(QNX或VxWorks)中运行一个PC/104单元,操作系统中包含了算法和控制策略,用于测试自动代码生成工具和集成架构创建的代码的完成。我们在现场实验的真实无人机中也使用了相同的单元。我们可以使用Simulink External Mode软件对无人机进行调试。通过这个软件,我们可以监测用户需要实时知晓的信号值。此外我们可以改变嵌入式处理单元中所执行算法的参数。在操作中所使用的界面,与控制工程师在仿真设计算法时所使用的界面完全一样。由此,整个测试环境完全透明,而且能以同现场测试一样的方式进行HIL测试,从而大幅减少开发时间。
对比飞行遥测和使用同样的GNC算法的HIL仿真,可以表明HIL的精准性和与真实测试结果的相似性。在一架改装过的无线电控制的直升飞机上集成了几个传感器(加速度计,回转仪,磁力计,GPS和一个高度计)和一个处理单元(见图3),将其转变成一架无人机,进行飞行测试。无人机在没有过冲或任何一个永久误差的情况下,达到了水平面要求的参考值(见图4和图5)。HIL仿真和真实的飞行测试结果极其一致。
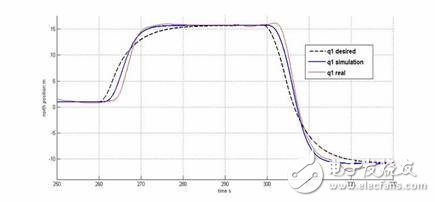
图4:北方位置对比结果
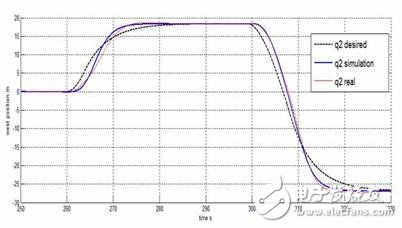
图5: 西方位置对比结果
HIL环境非常适用于测试包含真实硬件的整个系统。使用NI PXI,我们在实时状态下以低延时仿真了一个复杂的无人机模型,并完美模拟了航空设备界面。这个环境能检测出软件仿真中无法显示的错误,从而避免现场实验意外的发生。因为控制工程师在设计,开发和验证过程中也会使用相同的可视化和调试工具,由此可以快速重复循环,减少开发时间。
TOP2 揭秘以mega16l为核心的无人机充放电电路
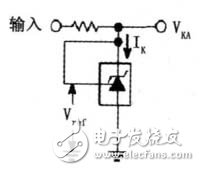
小型旋翼机器人是以模型直升机为载体, 装备上传感器单元, 控制单元和伺服机构等装置以实现自主飞行。而为了提高飞机的安全性, 需要设计一套设备监测系统, 实时的监测飞机的姿态信息, 机载设备的状况以及电源的情况等。该平台所使用的电源是两节锂电池串联组成的电池组, 利用锂离子电池的充放电特性, 设计了一套以mega16l 为核心的充放电管理系统。锂电池具有体积小、能量密度高、无记忆效应、循环寿命高、高电压电池和自放电率低等优点, 与镍镉电池、镍氢电池不太一样的是必须考虑充电、放电时的安全性,以防止特性劣化。因此在系统运行过程中, 为了保护锂电池的安全, 设计了一套欠压保护电路, 以防止电源管理系统因过用而发生电池特性和耐久性特性劣化。
电源管理系统总体框架
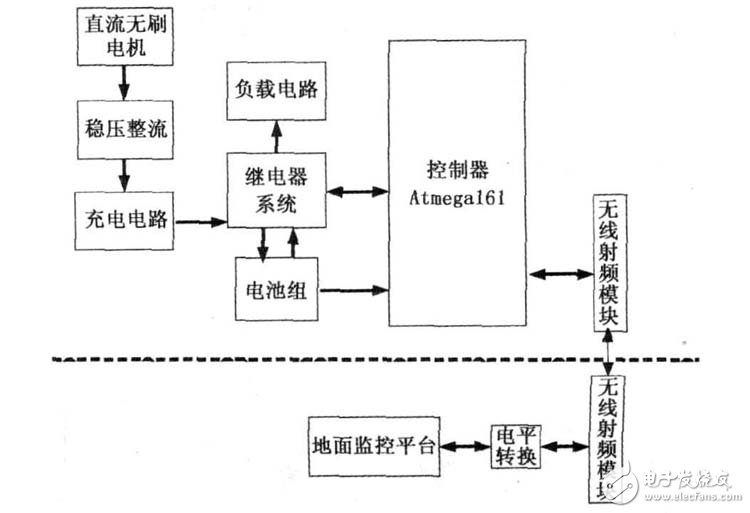
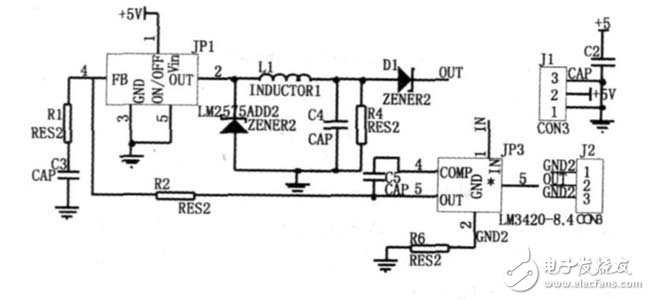
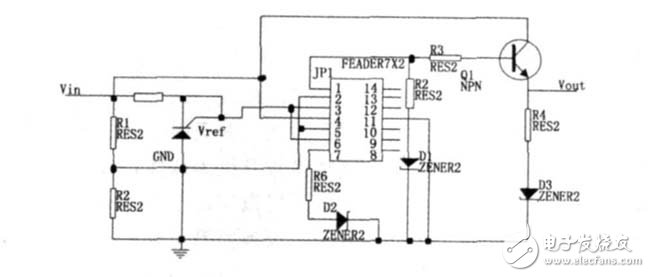
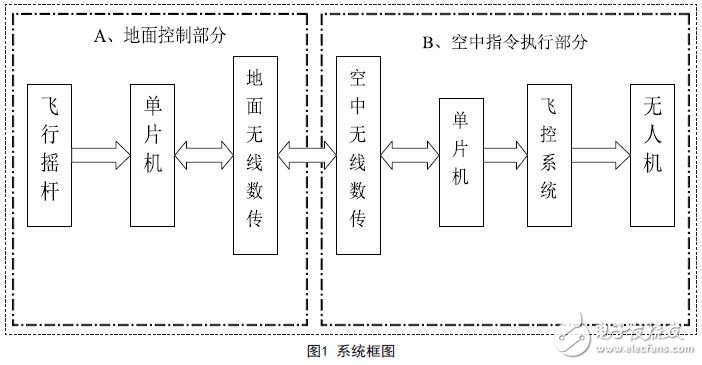
无人机电源管理系统是飞机实现自主飞行的重要组成部分, 其大致框架如图1 所示。在该系统中, 利用AXI 公司生产的2212/ 34 型号发电机将动能转换为220V 交流电, 再经过整流稳压后输出11.6V 的直流电压, 可由该输出电压为两节锂电池充电。电源管理系统的控制器是meg a161单片机, 该控制器通过检测两节锂电池的电压大小从而控制继电器开关来对电池进行充放电管理。
图1 电源管理系统框架
控制器采集到电源系统中的信息后, 通过无线传输设备将该数据实时传输给地面。地面监控平台还可以发送一些指令给mega16l, 通过控制继电器开关来控制电池充放电, 从而实现监测和控制飞机的目的。机上电源模块由两节英特曼电池有限公司生产的锂电池组成, 电池组电量充足时电压为8?? 4V.电池的荷电量与整个供电系统的可靠性密切相关, 电池剩余电量越多, 系统的可靠性越高, 因此飞行时能实时获得电池的剩余电量, 这将大大提高飞机的可靠性。















