全文2368字,
预计阅读时间5分钟
原创 | 李郑振
编辑 | 吕嘉玲
1.前言
无人机(Unmanned Aerial Vehicle, UAV)在日常生活中具有监视、运输和摄影等许多领域的多种用途,极大地便利和丰富了人们的生活。当前大多数无人机使用遥控器操作,这对肢体损伤或残缺的使用者非常不友好,史蒂芬霍金说过:“残疾不该是一个人成功路上的障碍”[1]。使用意念随心所欲的控制机器人是科学家们长久以来的梦想。脑机接口技术(Brain Computer Interference,BCI)可以采集使用者的运动意图作为机器人的控制信号,能够真正实现无人机的智能化控制,并且能够为肢体损伤患者提供一条新的控制途径。当前BCI技术已经在虚拟键盘、电动轮椅和服务机器人等方面有了初步的应用[2]。
2.BCI系统的介绍
表面脑电信号(Electroencephalogram, EEG)由于其无创性以及采集方便,当前大多数BCI系统均基于EEG信号。基于EEG的BCI系统主要分为EEG信号采集、EEG信号的预处理、EEG信号的特征提取和训练分类器几个步骤,使用人工智能的方法从EEG信号中提取人的意图作为机器人的控制信号。
通常使用有监督的分类策略,将人做运动或者运动想象时的脑电信号采集,所做动作作为标签(Label),使用人工智能方法训练分类器,可以实时的从使用者的EEG信号中提取运动意图控制机器人。
3.脑电信号的采集与分析
EEG信号由大脑皮层神经元的电活动产生,是一种微幅级别的神经电信号,可以通过脑电帽无创采集(分为干电极、湿电极两种型号,湿电极信号效果好,但是需要打导电膏)。对于脑电的标准电极放置位置的介绍如图1所示。
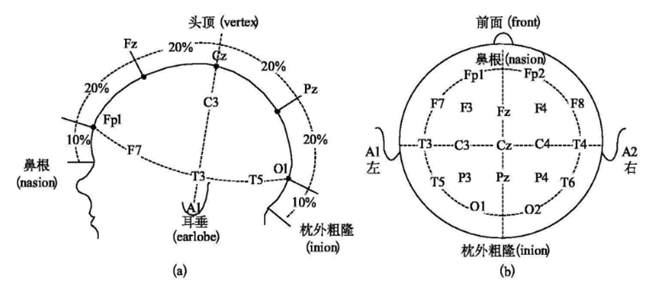
图1:10-20 国际标准系统电极放置法[3]
实际分析中根据所需要的功能选择脑电通道(比如C3、C4与人体运动功能相关,对于运动的分析我们通常只需分析C3、C4通道),对于EEG信号,由于其幅值小、干扰大,所以必须对提取的EEG信号进行预处理。
提取的EEG信号首先要进行50Hz陷波滤波,去除由工频干扰引起的高频噪声;接下来去除眼电(眨眼引起的电信号)引起的噪声和伪影;之后,使用0.5 -30Hz滤波器来进行滤波,通常大部分的EEG信息处于此频带。如果信号的振幅高于50-70μV。它们通常被视为肌肉噪声、眼球运动、眼球链接和心跳等低频噪声产生的伪影[3],预处理过后的EEG信号可以用于提取运动意图作为机器人的控制信号。
4.BCI技术用于机器人控制
为了实现BCI系统,特征提取和分类是两个不可或缺的部分。预处理过后的脑电进行特征提取,提取后的特征送入神经网络进行分类。对于EEG等生理信号,最常提取的特征为时域特征(均方根值、过零点数、众数等),此外,频域特征也被广泛用于生理信号的分析。
特征提取采用滑动时间窗,为了满足在线分类的实时性需求,窗长通常不小于0.1 s。从滑动时间窗提取EEG信号进行特征提取,将提取的特征送入分类器进行分类。分类器通常使用传统机器学习算法(支持向量机、线性判别分析)或者神经网络(多层感知器、卷积神经网络)。
整体的控制系统如图2所示,首先进行数据采集实验采集受试者EEG信号,接下来离线训练分类器,在线分类(实际使用)过程中,将实时提取的EEG特征送入之前离线训练好的分类器,从而获得运动意图作为机器人的控制信号。
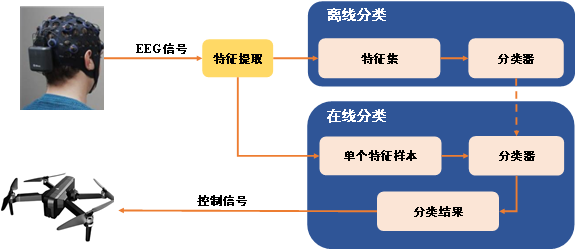
图2:基于BCI的UAV控制系统整体框架
5.无人机的BCI控制策略
对于UAV的控制,整体使用BCI控制系统框架(数据采集、数据预处理、特征提取、分类),但是目前有几种不同的控制策略,分别为面部运动控制策略、运动想象控制策略和稳态视觉诱发电位控制策略。
三种策略的不同之处在于数据采集过程中的实验设定。对于面部运动控制策略,EEG信号采集过程中,受试者面部做一些表情;对于运动想象控制策略,受试者只是大脑中在想象做运动(实际并没有做);对于稳态视觉诱发电位控制策略,信号采集过程中,给予受试者不同频率的视觉刺激。
对于不同的实验内容,大脑激活的区域也不相同(比如对于面部运动和运动想象,激活的是大脑皮层运动功能区;对于稳态视觉诱发电位控制策略,激活的是大脑皮层视觉功能区),后续的分析需要从激活区域处的电极提取EEG信号,接下来我们将对三种策略进行简单介绍。
5.1 面部运动控制策略
面部运动控制策略使用机器学习或深度学习的方法将面部表情和头部运动与无人机的运动相匹配,将分类器的输出转换为控制指令。简言之,就是人使用面部的运动来控制无人机的运动。比如:扬起眉毛(起飞)、用力眨眼(着陆)、向右看(向右移动)[4]。数据采集过程中,受试者分别做不同的动作并采集EEG信号用于训练分类器。
在做面部运动时,大脑皮层运动功能区激活,此时我们主要分析运动功能区处电极采集到的EEG信号(中央区C3、C4)。(注:根据设备电极数目的不同,不同设备对于同一功能区选择的电极通道数目也不相同。比如Neuroscan Electrode Cap设备,采集的是运动功能区C3、C4、CP3、CP4、FC3和FC4通道。)
5.2 运动想象控制策略
对于运动想象控制策略,使用者在大脑中通过想象来控制UAV的运动。数据采集实验中,屏幕出现随机图像(图像含有向左转、向右转、悬停等信息提示),受试者根据图像提示进行想象,完成数据采集。运动想象过程中,大脑皮层运动功能区激活(中央区C3、C4通道),我们主要分析中央区部位电极采集到的EEG信号。实际控制中,可以想象向左运动,UAV向左转,想象向右运动,UAV向右转,不做想象时UAV空转向前飞[5]。
5.3 稳态视觉诱发电位控制策略
稳态视觉诱发电位具有高信噪比和鲁棒性的优点,被广泛用于BCI系统。通常使用闪烁频率不同的图像给予受试者视觉刺激,从枕叶后极的视觉皮层(通道O1和O2)提取大脑活动,(比如使用快速傅里叶变换提取频域的特征,用于获得受试者的运动意图)实现UAV的运动控制[1]。
比如,当受试者看向左边的图像,UAV向左转,当受试者看向上方的图像,UAV起飞。不同方位的图像闪烁频率不同,如图3所示。同时UAV将实时视频发送到LCD显示器。根据实时反馈,受试者执行指定的任务以完成无人机连续飞行[6]。
6.总结与展望
当前从EEG信号中提取运动意图控制UAV的方法局限性还是比较大,本质原因在于无创EEG信号比较微弱,外界干扰很难完全消除,极大的限制了BCI系统的应用,相信随着科学家们的不断努力,使用意念随心所欲控制UAV的理想一定会实现。
参考文献
[1] A. Chiuzbaian et al., “Mind Controlled Drone: An Innovative Multiclass SSVEP based Brain Computer Interface,” 7th International Winter Conference on Brain-Computer Interface, 2019, pp. 1-5.
[2] A. Nourmohammadi et al., “A Survey on Unmanned Aerial Vehicle Remote Control Using Brain–Computer Interface,” in IEEE Transactions on Human-Machine Systems, vol. 48, no. 4, pp. 337-348, Aug. 2018.
[3] 李颖洁, 脑电信号分析方法及其应用[M], 科学出版社, 2009.
[4] A. E. Itsueli et al., “Drone Control Using Electroencephalogram (EEG) Signals,” SoutheastCon Conference, 2022, pp. 87-88, doi: 10.1109/SoutheastCon48659.2022.9764002.
[5] Y. An et al., “UAV control in 2D space based on brain computer interface,” 2017 4th International Conference on Systems and Informatics (ICSAI), 2017, pp. 594-598.
[6] M. Chung et al., “The Human-Unmanned Aerial Vehicle System Based on SSVEP-Brain Computer Interface,” Electronics, vol.10, p.3025, Jan.2022, doi:10.3390/electronics10233025.
-END-
本文由西湖大学智能无人系统实验室博士生李郑振原创,申请文章授权请联系后台相关运营人员。
欢迎来到西湖大学智能无人系统实验室!我们的实验室专注于小型无人机(UAV)的基本理论和新应用。技术研究领域包括(i)单无人机的制导,导航和控制,(ii)多无人机的集群系统,以及(iii)基于视觉和其他类型的传感器的智能传感系统。目前,我们有十多个小组成员,包括博士后,博士生,研究助理和访问学生。他们都毕业于中国和海外的顶尖大学。我们拥有一流的实验设备,如Vicon,动作捕捉系统和各种实验无人机平台。
欢迎来到西湖大学智能无人系统实验室! 小型旋翼无人机在民用和军事领域有广泛的应用,涉及到众多的科学研究问题。 西湖大学“智能无人系统实验室” 关注于微小型无人机的基础理论与应用研究,面向国家和社会重大需求,专注于从事高影响力的研究工作。 实验室目前关注的研究领域包括单无人机系统的导航制导与控制、多无人机系统的协同控制与估计、以及基于视觉和多种传感器的智能感知系统。 实验室具有一流的科研设施、完善的工作条件、活跃的科研氛围。 目前实验室已有十几名优秀团队成员,分别来自国内外著名高校。 此外,实验室具有高精度VICON室内定位系统、一系列空中和地面机器人平台、GPU计算服务器、3D打印机等设施,为开展相关研究和实验奠定了良好基础。
















