在喷雾机无人机机动过程中,必须考虑障碍物的存在,例如重型工具、移动车辆和机器人,以避免碰撞,同时仍然保持“精确喷洒”和无人机的“安全”。因此,喷雾机无人机的根本任务变成了“智能技术操作”,无人机自主识别障碍物,并以平稳的机动完成规定的避碰动作。也就是说,喷雾器无人机系统要自主高效地避开飞行路径中的各类障碍物,保证喷雾覆盖范围,防止重载振荡引发事故,避免自主飞行灾难,有效减少财产损失和人员伤亡。
喷雾器无人机的主要目标是喷洒最大的耕作区域,具有足够的喷洒覆盖范围和良好的液滴沉积。然而,在喷洒时,必须考虑到农田内的一些限制条件。这些包括 (a) 场地形状;(b) 不同的天气条件;(c) 现场障碍。其他喷雾性能限制是喷雾器无人机本身固有的,其中包括 (a) 液体负载,最终会减少;(b) 液体容量或车辆重量;(c) 电池/燃料容量;(d) 车辆类型;(e) 喷雾压力。为简洁起见,农用喷雾机无人机的基本示意图如图1所示。
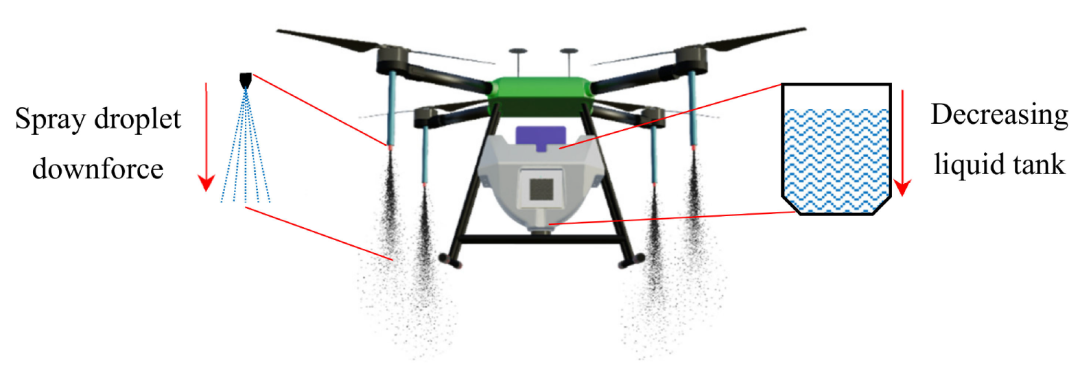
图1 农业喷雾器无人机(四旋翼)
与农业自动驾驶车辆类似,自动喷雾器无人机也遵循覆盖路线计划。已经对农田覆盖的路线规划进行了大量研究。一些路线规划研究侧重于不同的几何场形状,而另一些则没有关注场的几何形状。一个典型的路径规划结构如图2所示。

图 2. ( a ) 不考虑几何的路径规划;( b ) 考虑几何的路径规划
图3显示了过滤后的路径规划,不包括可见的卫星障碍物。

图3 ( a ) 从卫星数据中选择的字段;( b ) 为领域生成的计划
液体负载和晃动
众所周知,农用喷雾机无人机带有一个液罐,液罐有三种可能的情况:(a)飞行过程中液位不断下降;(b) 车辆飞行运动改变了车辆和坦克的角度;(c) 罐内液体在改变方向时产生晃动。第一种情况是液位下降不断改变罐的重心。其次,飞行的活动改变了罐的角度,这也改变了液罐的重心。Khorsandi、Ayers、Freeland和Wang 展示了倾斜罐如何改变重心,如图4所示。第三种情况,即液体晃动,与液位、罐倾斜角和速度有关。

图4 液体移动和重心 (CG1 ,CG2 ) 位置
在图5中试验了30%的填充率对罐内的晃动影响,专门针对喷雾机无人机的液体晃动做了实验。结果表明,内部水平和垂直格栅可以有效减少罐体液体的晃动和喷雾机无人机罐体的振荡。

图5. 晃动影响比较:( a ) 自由流动的液体与 ( b )包括具有30%液体的垂直和水平栅格
农田上的障碍
由于低空飞行,农田上的障碍物较多,如梯子、泵房、变电站、电力线、电话塔、灯塔、成群的树木、散落的树木、飞鸟或蝙蝠等。示例障碍物图像(卫星图像)如图6所示。

图 6. 农田障碍物,卫星视图( a )房屋( b ) 电塔( c )大灌木( d )树木
要成功、智能地避开这些障碍物,就必须对农田上所有可能的障碍进行分类。在对农田上所有可能的障碍物进行分类后,我们可以看到其中一些障碍物,全局检测系统可以检测到更大尺寸的障碍物,而有些则需要由局部检测系统检测。局部检测和避障操作需要实时分析、智能识别、潜在区域检测、合适路径等。因此,喷雾器无人机需要合适的检测传感器或传感器融合。
避障技巧
在农田上使用本地卫星图像进行避障和路径规划可能是有害的。由于卫星数据会在特定的时间表之后更新,有时图像会在障碍物出现之前更新,这可能会导致事故。此外,在更新障碍物的图像后,障碍物可能会消失,这可能会导致不需要的路径生成。有时,即使是很小或很窄的障碍物也无法从卫星图像中看到。因此,局部避障对于喷雾无人机来说非常重要。
Bug算法
在所有避障方法中,最简单的避障方法是bug方法。Lumelsky 和 Stepanov在bug移动之后提出了这种方法。他们做了两个版本的 bug算法:Bug1和Bug2,如图7所示
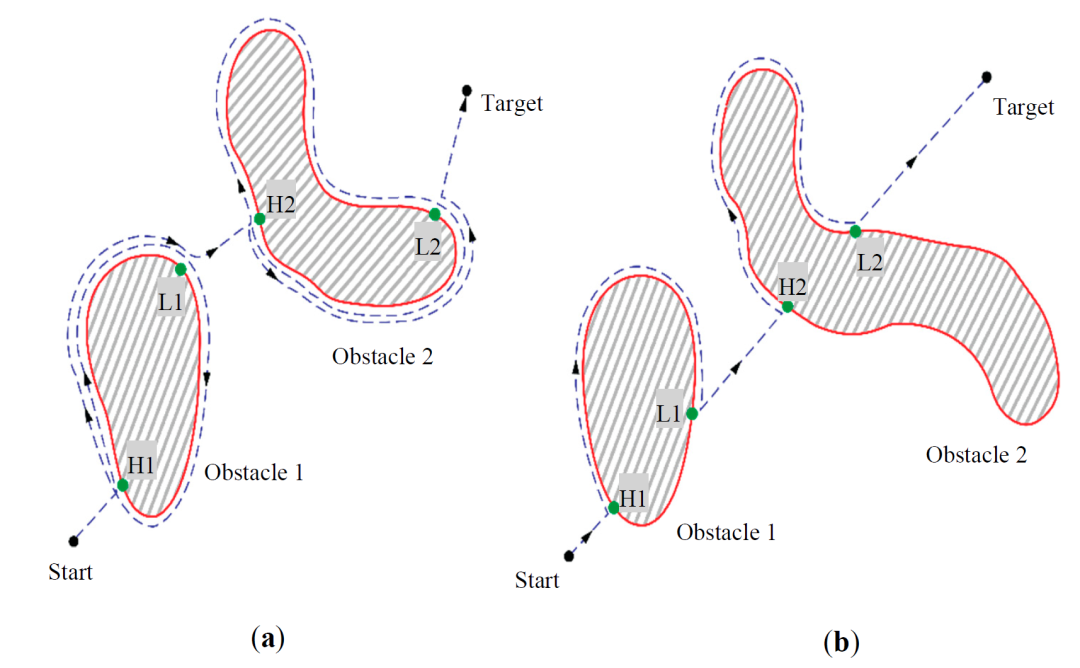
图7 Bug1( a )和 Bug2算法( b )的轨迹
人工势场算法
人工势场算法 (APF) 由 Khatib提出,这是一种独特的移动机器人实时避障方法。该算法为其已知区域的每个点设置一个人工势场,并开始向可能的较低区域移动,其中目标点是可能的最低区域。车辆总是被吸引到尽可能低的区域,最终到达目标点,如图8所示。
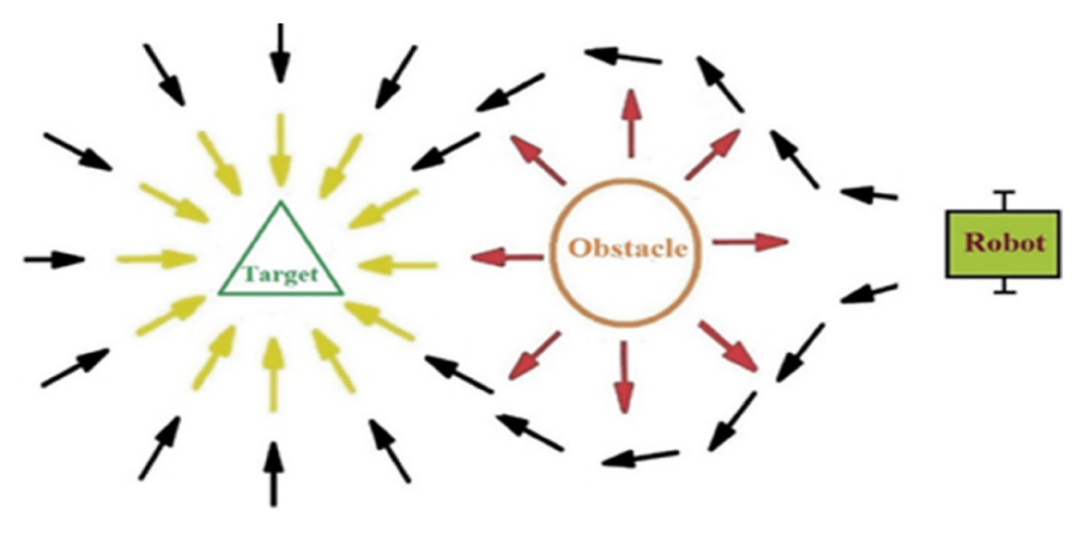
图8 人工势场
碰撞锥法
Chakravarthy和Ghose首次针对2D运动场景提出了碰撞锥概念。作者将任何障碍物假设为圆形区域,并使用无人机的速度矢量在碰撞锥内计算从无人机位置到障碍物区域的距离。这个概念适用于任何不规则形状的未知障碍物,并防止两个不规则形状的物体或车辆发生碰撞,如图9所示。

图9 碰撞锥和瞄准点
神经网络
神经网络算法受到人脑的启发。神经网络接收数据,训练自己识别数据中的模式,然后预测一组新的相似数据的输出。计算模型使用生物神经网络系统重复训练或函数,直到出现最佳结果。动态神经网络能够自动调整其结构,跟随车辆环境的复杂性,实时了解车辆状态及其避障决策之间的映射关系,并有效降低车辆的计算量。图10显示了针对复杂环境进行训练的示例训练数据,但结果优于其他一些避障方法,如图11所示。
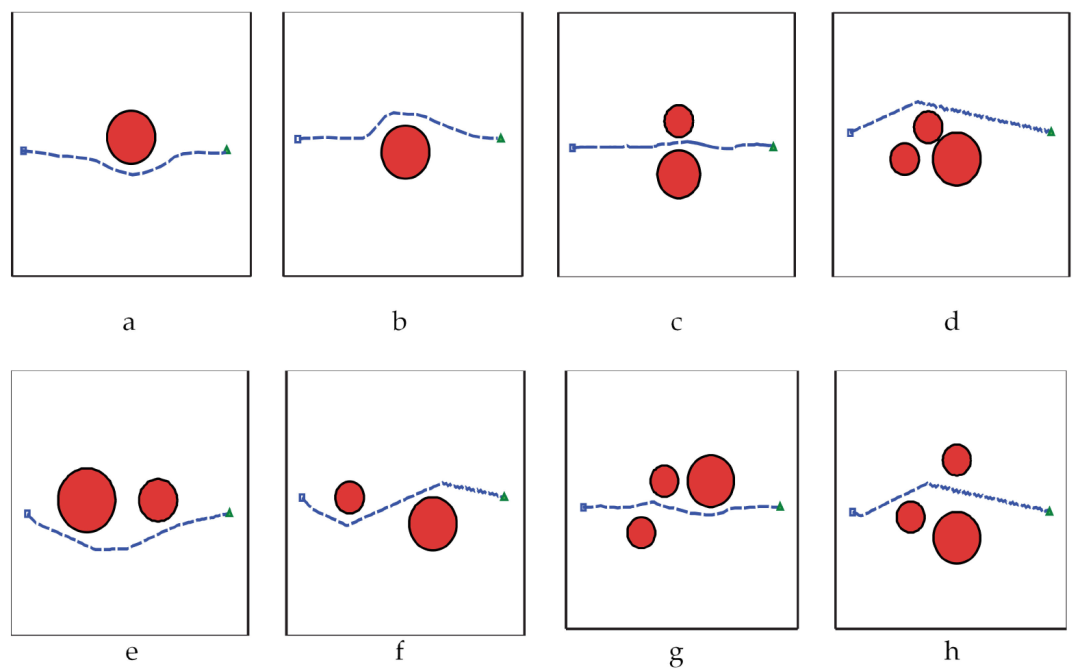
图10 神经网络训练数据( a - h )在训练阶段生成的具有不同位置的单个和多个障碍物路径
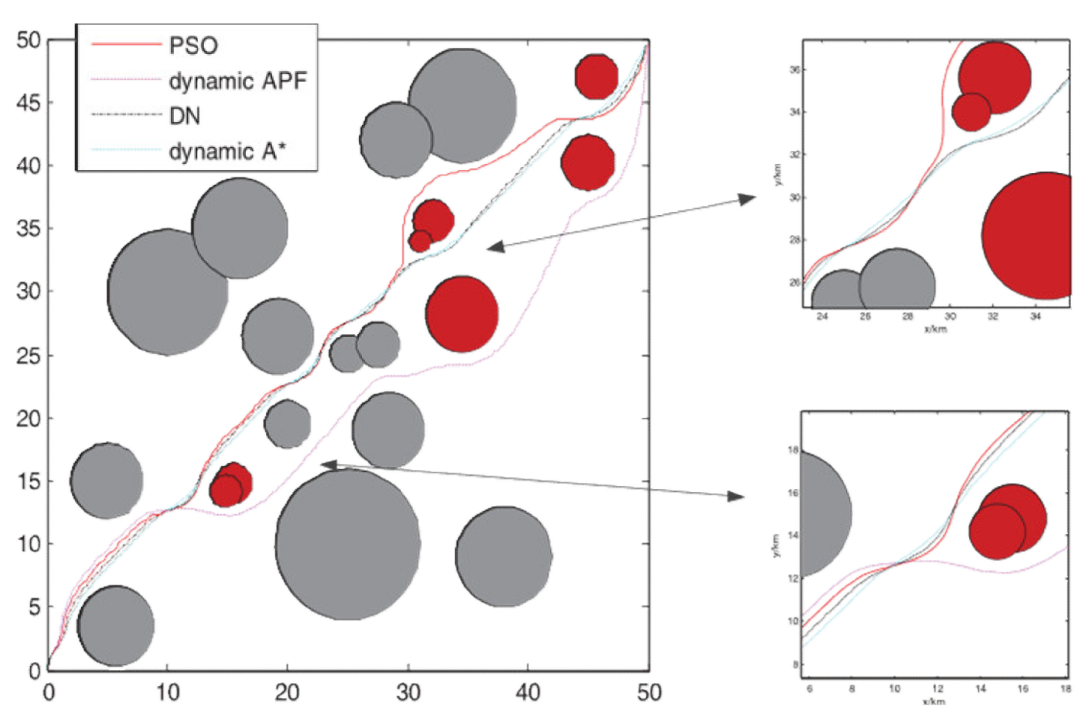
图11 使用训练数据的碰撞避免性能与粒子群(PSO)、动态A*算法和人工势场(APF)比较
无人机喷雾器由于其动态运行和加载条件仍面临障碍物检测挑战。其中之一包括“喷雾沉积和覆盖”,这些参数与无人机重量和有效载荷直接相关;另一个与智能传感器和无人机系统的高成本有关:无人机飞行时间短、运营成本高是农民关注的主要问题。
源自:Agronomy 2021, 11, 1069. https://doi.org/10.3390/agronomy11061069















