
无人机在电站、码头、矿场等场景执行任务时,指南针时常会受到外界磁干扰或无人机自身的电磁干扰,此时,为保证无人机正常高效作业,可以通过双RTK测向定位计算出偏航信息,不受指南针情况影响,十分适合复杂多变的磁场环境场景。
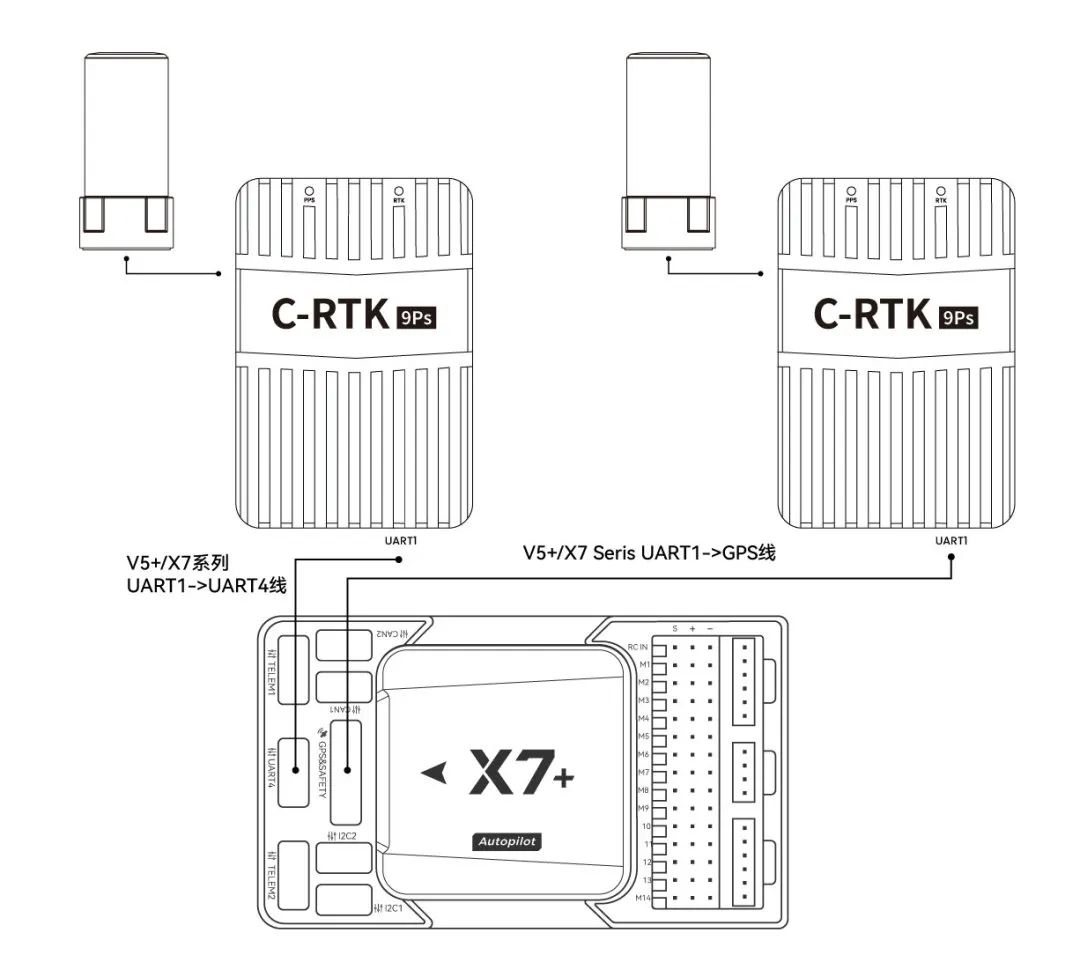
硬件使用:两个C-RTK 9Ps天空端
固件要求:Copter 4.0.4及以上版本,Plane 4.0.6及更高版本Rover 4.1.0或更高版本
01硬件设置
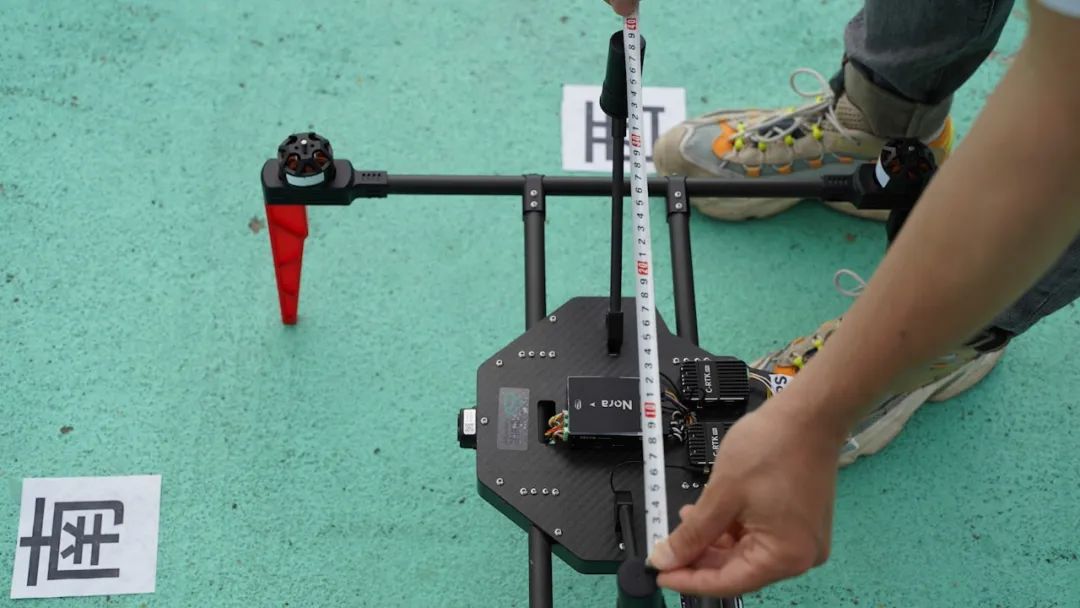
首先将两个RTK 9Ps分别连接至GPS口和UART4端口,两个模块之间安装距离并无要求,但两个天线之间的水平距离须大于30cm。
02地面站设置
-连接地面站,进入全部参数列表;
-设置SERIAL_PROTOCOL=5(UART4的串口协议为GPS);
-设置GPS_TYPE=17;
-设置GPS_TYPE2=18;
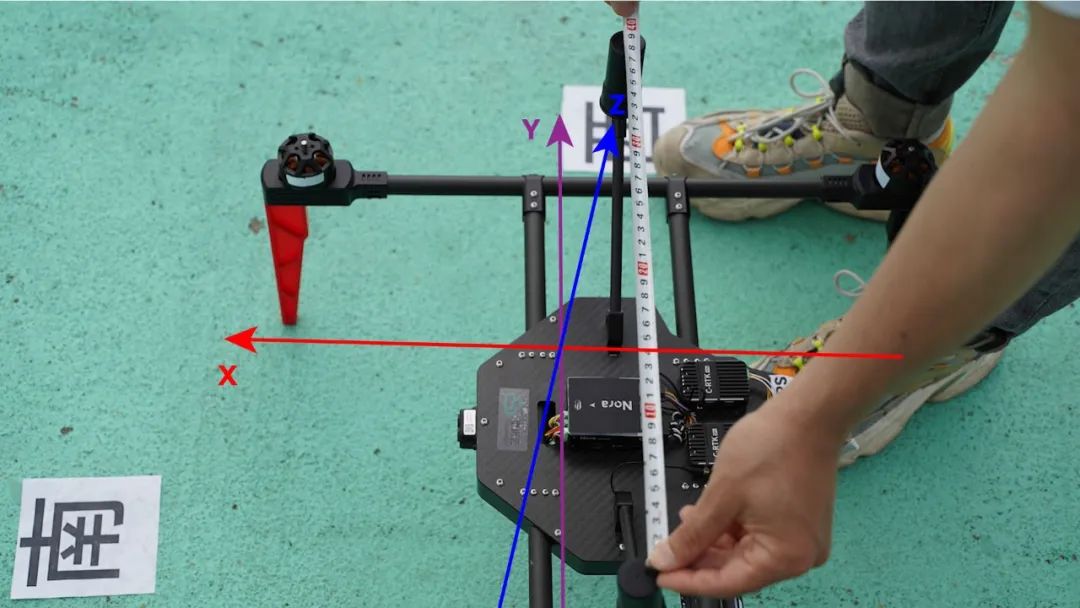
-根据下图设置X、Y、Z的偏移量,将天线安装于Y轴,保持相距39cm,因此设置Y轴偏移0.195m与-0.195m;
-设置GPS_AUTO_SWITCH=1;
-设置AHRS_EKF_TYPE=3;
-设置EK2_ENABLE=0(禁用EKF2);
-设置EK3_ENABLE=1(启用EKF3);
-设置EK3_MAG_CAL=3(0为固定翼,3为多旋翼,2为车或船)。如是4.0固件,则EK3_MAG_CAL设置为5(使用外部偏航传感器);如使用4.1或更高版本,还需设置EK3_SRC_YAW=2或3(2为仅使用双天线测向,3为双天线测向失效后自动切换使用罗盘数据)。
03测向检验
参数设置完毕,写入参数并重启飞控,再次连接飞机,进入消息窗口后可以看到EK3 IMU YAW Aligned的信息,如图所示,表明两个RTK已开始正常工作,即双RTK测向成功生效。

如地面站检查航向与实际相反,则需调换两个RTK的接线或者交换GPS_POS1与GPS_POS2的偏移数值。
此时定位精度仍为单点RTK定位,如需更精确的定位,需要在地面架设地面端以获得厘米级定位。
2008,将无人机开源飞控引入国内,推出了自主设计的高性价比无人机控制器,推动和填补了国内无人机空白。
2012,CUAV正式成立且建成自家生产线,并与国际ArdupilotPX4建立合作,完善了无人机控制器及相关产品。先进的产品与可靠的品质,获得了行业的认可。
2015,组建研发团队,开始软硬件共同研发。成为Dronecode基金会成员,成为Ardupilot官方合作企业。2016,业内首款自主研发mavlink协议的无线高清图数一体链路-Hacklink问世,将客户群扩大至世界各个角落。
公司整体搬迁至中国(广东)自由贸易区广州南沙新区,研发工程师达到20多名,推出高精度差分GPS: C-RTK并大量应用在测绘、无人机表演行业。2018,通过国际质量标准体系ISO9001认证。且推出业内首款商用的:LTE网络的无人机云端系统(UAV-HUB)、LTE网络的通讯模块(LTE-LINK),将无人机无限距离远端控制、云端化的理念引入行业应用。
2017,现在,我们已经拥有自己的研发团队与生产线。并开发了PC端,安卓端,网页端的无人机应用,配合自主研发的飞行控制系统 、GPS定位系统、 无线数字链路系统和无人机云端(UAV-HUB)解决方案, 让无人机更好的服务于每一个应用。
















