无人机通常可以假设基于 GPS 的户外无障碍操作。然而,一些应用要求飞行器在 GPS 可能不可靠甚至不可用的狭窄环境中飞行。为了简化与空中机器人自主导航相关的所有任务的完成,已经开发了几个针对完整软件架构的开源项目,例如ArduPilot 或PX4 。然而,这些方法通常缺乏执行和支持高级功能的灵活性,而这些功能通常是希望开发无人机自主导航创新方法的用户所要求的。图 1展示了我们的软件架构。系统分为若干模块,分别负责不同的任务。核心思想是结合简单的概念和组件来构建一个可靠的系统。每个模块作为无人机上的独立进程运行。根据空中机器人的设备,不同的模块可以实现各种各样的算法和技术来执行它们的任务。
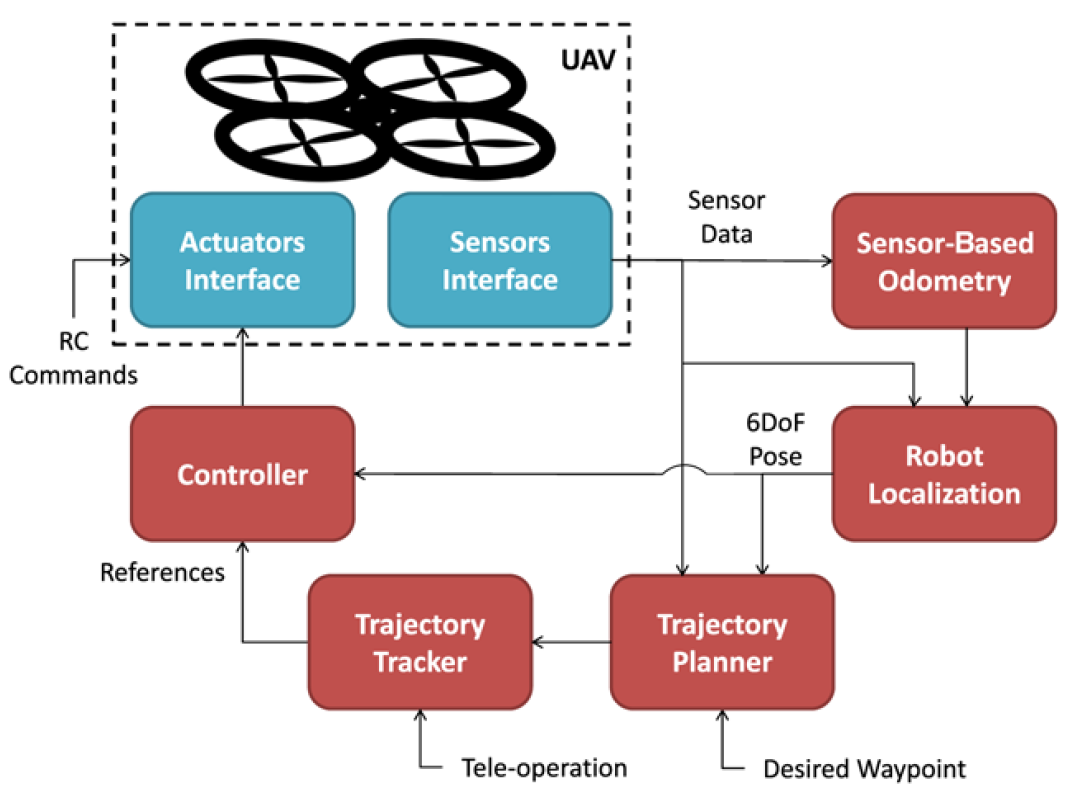
图1 拟采用架构示意图
在全3D环境中规划无人机轨迹是一项复杂且耗时的任务。现有技术中主要使用两种方法:概率或基于采样的方法和启发式或基于图的方法。然而,这两种算法在无人机重新计划任务中用作实时算法时都存在很大的不便:给定初始位置和目标位置,计划的轨迹在一次执行之间可能会有很大差异,因此多次连续重新计划可能会导致不必要的更长和不一致的重新规划的轨迹。采用从RGB-D相机获得的数据对机器人姿态的初步估计,该相机提供来自其环境的图像和3D点云,如图 2所示。

图2 这项工作中使用的 RGB-D 传感器,Orbbec Astra,以及无人机前方当前场景的样本 RGB(左)和深度(右)图像
GPS拒绝区域中的机器人定位方法利用了MCL,这是一种流行的室内机器人技术。它基于该区域的已知地图和粒子滤波器来估计地图内空中机器人的姿态,该算法可在ROS wiki中找到。粒子可以手动初始化,也可以通过设置初始位置和协方差矩阵来自动初始化,以在空间中分布粒子,如图 3所示。

图3 在 3D 地图中的已知位置初始化粒子云
一旦我们基于本地感知让无人机起飞并飞行,下一个目标是在部分已知的环境中规划和执行轨迹,以便我们可以有效地执行航点导航和避障。如果存在较大的障碍,则重新规划的规划时间可能会过长。这是由于在搜索解路径时顶点沿障碍物的对称3D扩展引起的,如图4的中心所示。
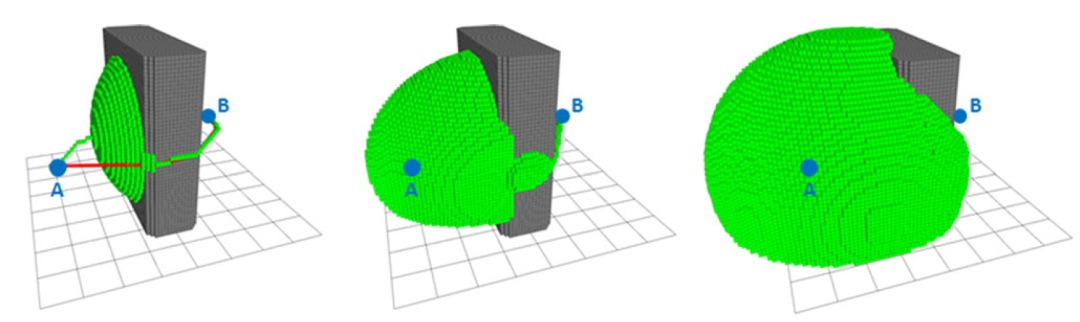
图4 由加权延迟 Theta* 计算的扩展顶点(绿色)和结果路径(红色)从 A 点到 B 点,避开墙壁
流动河流的目标检测具有很大的挑战性。连续塑性运动带来了许多挑战(例如,训练数据量少、数据集高度不平衡、目标位置和场景变化频繁)。本研究以yolov5为基线算法,提出了多种优化策略来解决目标检测中的问题。该算法的总体流程图如图5所示。

图5上图显示了从输入八叉树(灰色立方体)计算的 GOM(彩色立方体)。下图显示了从深度相机点云(右下角相机图像上的彩色球体)和 AOM 构建的 LOM(彩色立方体)
航路点之间的过渡必须平滑且没有开销。如图6所示,可以使用样条插值生成连续轨迹,但这并不能保证符合与障碍物的安全距离。遵循航路点之间的直线是确保无人机沿完整轨迹远离已知或检测到的障碍物的唯一方法。

图6 使用样条插值(绿线)和直线(红线)的原始路径(蓝色球体)的轨迹
用于展示我们架构的无人机是来自 Ascending Technologies 的名为AscTec Neo的研究原型,如图 7所示。它是一架带有 9 英寸螺旋桨的六轴飞行器,最大可提升2公斤。

图7 用于实验的AscTec Neo无人机
所采用的架构不仅通过VI传感器得到验证,还使用RGB-D相机作为主要传感器,特别是Orbbec Astra,如图 8所示。

图8 在无人机上测试的两个主要传感器VI-Sensor(左)和 Orbbec Astra(右)
为了成功实现稳健的自主导航,空中机器人必须同时表现出可靠性和良好的性能。在先进航空航天技术中心 (CATEC) 的室内试验台进行了广泛的现场测试。如图 9所示,测试台装有一个基于 20台VICON 摄像机的室内定位系统,只需在物体上安装无源标记即可进行定位和/或跟踪。该系统能够以毫米级精度实时提供每个物体的位置和姿态。

图9 CATEC 的室内试验台展示了无人机经过测试的场景之一,在本例中为管道工业环境
为了证明定位方法的稳健性,也在无人机快速运动的情况下,进行了一系列额外的测试。出于安全原因,测试包括手动携带无人机在CATEC测试台进行验证测试的相同场景中重现高速飞行。这些测试的示例图像如图 10所示,其中运动模糊清晰可见。

图10 在高速测试期间从前置摄像头采样 RGB 图像
尽管该系统性能良好,但其性能和开发过程仍有改进的空间。在开发自主系统时,现场测试是最昂贵的任务之一,因为在进行飞行实验之前,空中平台必须完全运行,必须有测试空间,并且必须有特定的合格人员(包括一名安全飞行员) )。此外,如果在户外进行测试,天气必须正常,并且根据国家规定,可能需要无人机飞行员的有效执照。
源自:https://doi-org.uconn.80599.net/10.1002/rob.21757















