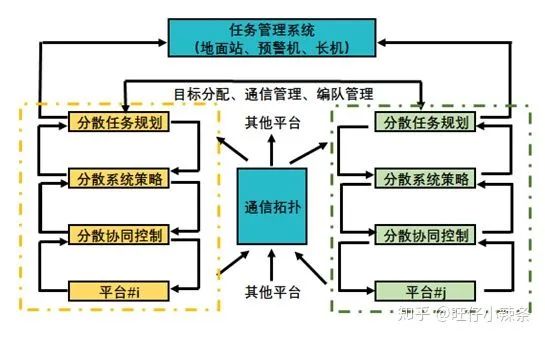
图4 分散化多机协同控制系统结构
无人机的自主导航是指无人机安全地从一个地点移动到另一个地点的过程。从技术层面可以分解成四个基本问题:
1、 What does the environment look like? 无人机必须知道环境的地图,才能在地图中找到路径。无人机确定环境的过程称为地图创建。
2、 Where am I? 无人机确定当前运动状态的过程叫做定位。
3、 Where am I going? 无人机在环境中确定下一个运动目标位置的过程称为运动决策。
4、 How do I get there? 在知道起点和终点的情况下,无人机规划如何到达目标的方法被称为运动规划。
无人机在未知复杂环境中的自主飞行问题主要有两个难点,一方面环境中存在不利于飞行控制的外部干扰,另一方面无人机缺少对环境的先验信息,需要在运动过程中建立环境地图以满足位姿估计和运动规划的需要。此时,上述几个问题将彼此关联,构成一个整体。其中定位与地图创建是自主导航中最基本的问题。依赖于具有足够精度的环境地图,而创建地图又以准确定位为基础。因此,定位与地图创建彼此依赖、不可分离,是未知环境自主导航中的“鸡和蛋”的问题。为此,研究人员在机器人科学中针对未知环境的导航问题提出了同时定位与地图创建(Simultaneous Localization And Mapping,SLAM)概念。为了获得全局一致的运动状态和题图估计,SLAM算法往往计算缓慢,无法满足无人机飞行控制中状态反馈的需要。因此在实际应用中,SLAM算法需要与高输出频率的快速运动增量估计方法(或称局部位姿估计方法)相结合。针对未知环境探索的任务,运动决策和运动规划问题关系紧密,可予以合并。此外,控制系统受到环境中的位置扰动影响,需要研究无人机在存在外部干扰情况下的控制问题。
如图5,以系统框图形式描述了无人机在未知复杂环境中自主导航和飞行控制问题的整体框架。框架包含五个主要部分:姿态控制、快速导航方法、SLAM算法、运动决策与规划以及轨迹跟踪,上述五个部分构成一个完整回路。其中快速导航方法根据传感器获得的无人机运动相关信息和环境信息估计运动增量,SLAM算法在此基础上计算全局状态和地图。两种估计方法通过简单的坐标变换即可得到以较高频率输出的全局运动状态估计。根据未知环境自主探索的任务要求设计合理的运动决策与规划方法,输出期望运动路径。然后针对无人机的运动特点,以轨迹跟踪的方法计算期望姿态,再通过高精度的姿态控制方法解决包含未知扰动的无人机姿态控制问题。
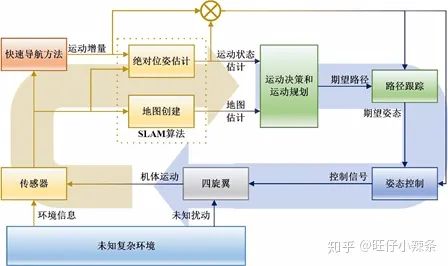
图5 无人机在未知环境中自主导航和飞行控制问题的方法框图
无人机的自主导航和控制问题涉及的技术领域很广,需要对以下问题进行研究:
无人机是一个非线性、欠驱动的被控制对象,飞控控制有四个研究难点:建模困难,欠驱动性,强耦合特性,易受外界干扰。因此虽然很多研究人员都已经开发了无人机的飞行控制系统,其控制算法的研究仍然是研究的热点。除了经典的比例积分微分(Proportional-Integral-Derivative,PID)算法外,反步法,现行二次优化控制方法和滑模控制方法都在无人机姿态控制系统设计中有所应用,且获得了比较好的控制效果。无人机是一个非冗余系统,容易受到例如风和执行机构故障等内部扰动的影响。无人机稳定悬停控制,姿态控制器和对位置姿态扰动的鲁棒性都需要进行验证纠正。
VIO(visual-inertial odometry)即视觉惯性里程计,有时也叫视觉惯性系统(VINS,visual-inertial system),是融合相机和IMU数据实现SLAM的算法,根据融合框架的区别又分为紧耦合和松耦合,松耦合中视觉运动估计和惯导运动估计系统是两个独立的模块,将每个模块的输出结果进行融合,而紧耦合则是使用两个传感器的原始数据共同估计一组变量,传感器噪声也是相互影响的,紧耦合算法上比较复杂,但充分利用了传感器数据,可以实现更好的效果,是目前研究的重点。对运动的估计量需要一个第三方工具测量其算法的准确性。
和其他自主运动系统一样,无人机的运动规划问题一直是研究重点。无人机因其垂直起降和悬停能力,可以跟踪平滑以及某些不平滑的三维轨迹,是非常理想的通用三维运动规划算法验证平台。通过水平扫描环绕的方式规划无人机的运动使其能完全扫描全部曲面;对有界不确定性线性系统渐进最优化的算法的研究;在满足高斯分布假设的非线性系统中获得概率可行路径解,对于无边界强不确定性的算法的研究。用一系列带有时间延迟的路径点描述路径,根据飞行参数计算各路径点之间的控制输入,通过规划无人机的三种动作形成动作序列实现协调转弯。
无人机机构简单且执行机构具有非冗余、低可靠性的特点,易受各种内外部扰动影响,因此其姿态控制的主要问题在于在线扰动抑制。以在线扰动估计和主动扰动补偿为基本结构,扰动抑制问题已获得了比较广泛的研究,其中自抗扰控制(Active Disturbance Rejection Control, ADRC)方法提出了针对一般非线性系统的主动补偿控制结构,具有很强的适用性。但是其扰动观测与扰动补偿包含共同的系数矩阵,不能完全解耦,不利于控制系统整定。另外应用其方法结构可以对不同模块分别设计进一步提升系统性能。在对无人机姿态控制自抗扰控制研究时,需要有一个第三方测量工具给予算法的验证与纠正。
在室内无GPS环境下,无人机的状态估计主要依赖于IMU和其他外部测量传感器(光学动捕系统等)组成的组合导航系统。由于高精度导航系统在完整系统设计中的基础性重要作用,很多研究人员从多传感器融合和多约束优化等方面进行了大量的导航理论和应用研究,取得了大量的研究成果。但是以往研究的主要重点在于对传感器数据的复杂处理,其中包含大量经验性和试探性的工作,缺少适用性强的高精度算法框架。在室内无GPS环境下无人机实现自主导航也成为了很多高校研究的课题,外部的测量工具在无人机的状态估计起到了至关重要的作用。
SLAM算法主要分为3大部分:前端(又叫跟踪或前端建图,跟踪又可以分成odometry loop closure)、后端、地图创建。而SLAM算法按照传感器的不同主要分为3大类:基于相机的SLAM算法、基于深度相机的SLAM算法、基于激光的SLAM算法。常用的传感器有:单目相机、双目/多目相机、全景相机、深度相机(RGB-D数据)、2D转轴雷达、可装戴设备等。其中,激光SLAM研究较早,理论和工程均比较成熟。视觉方案目前尚处于实验室研究阶段,极少看到实际产品应用。
单目视觉SLAM算法存在一些本身框架无法克服的缺陷,首先是尺度的问题,单目SLAM处理的图像帧丢失了环境的深度信息,即使通过对极约束和三角化恢复了空间路标点的三维信息,但是这个过程的深度恢复的刻度是任意的,并不是实际的物理尺度,导致的结果就是单目SLAM估计出的运动轨迹即使形状吻合但是尺寸大小却不是实际轨迹尺寸;由于基于视觉特征点进行三角化的精度和帧间位移是有关系的,当相机进行近似旋转运动的时候,三角化算法会退化导致特征点跟踪丢失,同时视觉SLAM一般采取第一帧作为世界坐标系,这样估计出的位姿是相对于第一帧图像的位姿,而不是相对于地球水平面 (世界坐标系) 的位姿,后者却是导航中真正需要的位姿,换言之,视觉方法估计的位姿不能和重力方向对齐。
经过众多领域的专家学者的不懈努力,SLAM问题已经获得了基于状态观测器的完整解决方案。并在一些实际系统中得到了实验验证。麻省理工大学、卡内基梅隆大学、宾夕法尼亚大学以及杜克大学等高校一直以来在SLAM问题的研究中处于领先地位。其中一些重要的研究成果呗用作后续研究人员的评价基准。国内对SLAM问题研究目前集中于国外先进研究的复现,缺乏具有独创性和实用型的研究成果。虽然SLAM问题的基本算法研究较为成熟,但是大部分研究都是针对二维环境中的移动机器人开展的,对三维环境的SLAM问题算法复杂度将增大一个阶次,严重影响算法计算速度,这也是现在三维SLAM问题研究的难点。另外对SLAM问题的研究大多将其当作一个独立系统进行,实际上一个运动系统的定位和地图建立不应该是一个任务的全部目的,而应该以具体的任务为目的进行相应的SLAM算法研究。在SLAM算法研究中需要外部的测量工具对其进行运动规划。
图6 SLAM原理图
未知环境的综合探索问题从最早的运动规划问题出发,逐渐与SLAM相结合,演变为包括规划、导航、控制在内的自主运动系统的综合性问题。近几年借助于SLAM问题的研究热度,也获得了很高的关注。在早期基于便捷搜索的算法基础上,二维环境的综合探索问题很快与SLAM问题结合,并发展出基于信息增益的探索策略。但是信息增益的计算十分繁琐,需要大量的迭代计算,难以实现。因此大部分将运动目标点的决策和朝向目标点的运动规划解耦,仅以目标点信息量选择最优目标,而忽略了运动路径上传感器的信息增益。针对全路径的信息优化问题仍需进一步研究。















