(一)四旋翼无人机是怎么火起来的?
2010年,AR.Drone横空出世;在AR.Drone的引领下,全球范围内都有一股将四旋翼商业化的热潮。2012年DJI相继推出了风火轮系列四旋翼机架、悟空四旋翼飞控和S800六旋翼飞行器。其实,2012年的时候,研发四旋翼产品的人们在热情之余也存有一丝迷茫:四旋翼飞行器是很好玩,但是它除了作为玩具之外,还有什么价值呢?就像AR.Drone被定义成玩具一样,DJI最早的多旋翼产品也被人定义成玩具、航模。这个问题在2013年得到了解答。随着DJI在2013年1月的推出Phantom,四旋翼飞行器市场的形势发生了巨大的变化。Phantom与AR.Drone一样控制简便,新手学习多半个小时就可以自由飞行;Phantom尺寸比AR.Drone大的多,抗风性更好,还具有内置GPS导航功能,可以在户外很大的范围内飞行;更重要的是,当时利用GoPro运动相机拍摄极限运动已经成为欧美国家的时尚,而Phantom提供了挂载GoPro的连接架,让用GoPro相机的人们有了从天空向下的拍摄视角。特别地,与传统的飞机和直升机航拍不同,多旋翼系统小巧灵活,能让拍摄者自由地控制角度和距离。就像iPhone重新定义了手机一样,我们也可以毫不夸张地说:Phantom+GoPro重新定义了航拍,也重新定义了相机。必须承认:四旋翼无人机成为航拍娇子要感谢大疆!
四旋翼采用了四个旋翼的机械结构,四个电机作为飞行的直接动力源,通过改变四个螺旋桨产生的升力来控制,结构和动力学特性得到了简化。如图(a)~图(d),四旋翼的前桨和后桨顺时针旋转,左右两桨逆时针旋转,这种反向对称结构代替了传统直升机尾旋翼。在飞行过程中,改变四个旋翼的转速,四旋翼将产生各种飞行姿态,使四旋翼向预定方向运动,完成任务。
四旋翼的地面坐标系和机体坐标系:
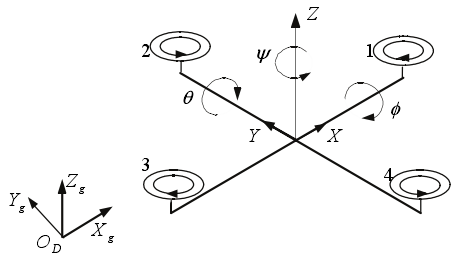
(1)俯仰角θ,机体轴OX与地面间的夹角。
(2)滚转角φ,机体轴OZ和包含机体轴OX间的夹角。
(3)偏航角ψ,机体轴OX在地面投影与地轴OgXg间的夹角。
(二)四旋翼无人机的运动原型
四旋翼飞行器结构模型如下:
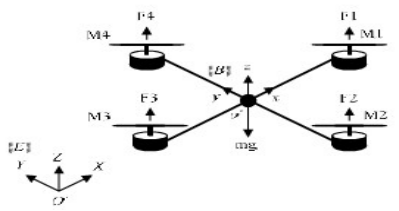
推进器(1、3)、(2、4)为互相对称的两部分。通过改变推进器转子的旋转速度,会使飞行器产生升力,引起运动。因此,通过改变4个推进器的转动速度,我们可以控制飞行器的垂直起降运动。如果相反地控制(2、4)推进器的旋转速度,会引起滚转运动;如果相反地控制(1、3)推进器的旋转速度,会引起俯仰运动;要使飞行器产生偏航运动,则需要通过共同控制(1、2)和(3、4)推进器的旋转速度。
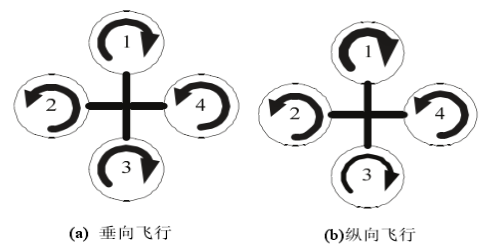
(1)垂向飞行:垂向飞行相对来说比较容易控制,控制方式如图(a),图中箭头的粗细代表旋翼转速大小。同时增加四个电机的输出功率,旋翼转速增加使得总的拉力增大,四旋翼无人机向上飞行;反之,同时减小四个电机的输出功率,旋翼转速下降,使得总的拉力减小,四旋翼无人机向下飞行。
(2)纵向飞行:纵向飞行控制方式如图(b)。增加后边电机的输出功率,旋翼转速增加使拉力增大,相应的减小前边电机的输出功率,使拉力减小。这样由于存在拉力差,机身会俯仰倾斜,从而使旋翼拉力产生水平分量,因此可控制无人机向前飞行。向后飞行与向前飞行正好相反。
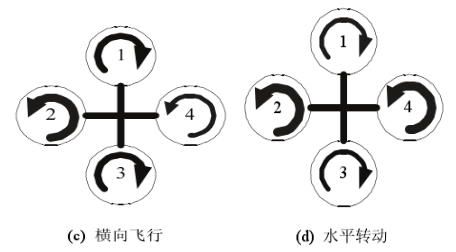
(3)横向飞行:由于四旋翼无人机的结构对称性,横向飞行的控制方式和纵向飞行完全一样,参见图(c)。
(4)水平转动:四旋翼无人机的水平转动可以借助旋翼产生的反扭矩来实现。旋翼转动过程中由于空气阻力作用会形成与转动方向相反的反扭矩,常规的直升机为了平衡反扭矩的影响,需借助尾桨的作用来实现。四旋翼无人机为了克服反扭矩的影响,使其四个旋翼中的两个正转,两个反转,且对角线上的两个旋翼转动方向相同。反扭矩的大小与旋翼转速有关,当四个旋翼转速相同时,反扭矩互相平衡,无人机不发生转动;当四个旋翼转速不同时,不平衡的反扭矩会引起四旋翼无人机的水平转动。为了使四旋翼无人机按照期望方向作水平转动,可以同时增加一对同方向旋转的旋翼转速并减小另一对旋翼转速,且转速增加的旋翼转动方向与期望的水平转动方向相同。水平转动控制如图(d)。