飞行器因当前电量仅够降落时将触发强行降落操作,由于飞手贪飞而取消低智能返航后仍不操控飞行器返航甚至远离返航点,从而惨遭“野外放生”。
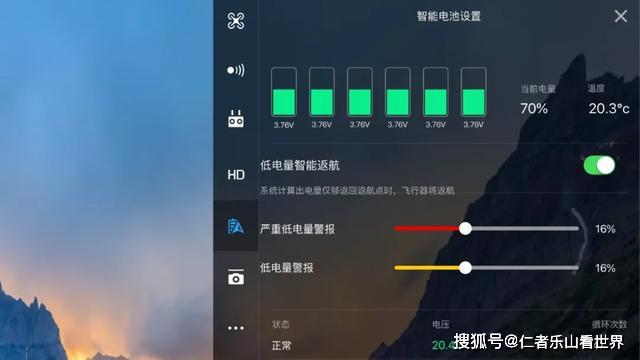
A. 智能电池设置
建议始终开启低电量智能返航功能,为了安全起见,在收到此提示后即进行返航操作。
B. 注意低电量返航的条件
“触发了低电量返航,飞行器就一定能回来”吗?但低电量智能返航所需电量取决于飞行器当前距返航点的高度、距离及预设返航高度。
所以:
1.若现在的返航点不是飞手当前所在位置,应及时刷新;
2.若在飞行中存在较大风力,且返航路线不是顺风,可能导致低电量智能返航无法完成;
3.若返航路线存在障碍物,则低电量智能返航可能因避障悬停或上升而无法完成。

C. 合理设置返航点
开启飞行器后,GPS 信号首次达到四格及以上时将自动记录飞行器当前位置为返航点。

或通过 DJI GO 4 / DJI GO app 来手动设置,可选择以飞机当前位置或移动设备的位置为返航点(前提是移动设备需开启 GPS)。
*若在移动过程中操控飞行器,需定时手动刷新返航点。
D. 若已经触发低电量强制降落,该如何操作呢?
1.该降落不可取消,但可持续上推油门杆阻止下降并通过水平杆量操控飞行器在合适地点降落;
2.保持冷静切忌慌乱,正确判断机头朝向并合理打杆将飞行器飞向自己所在区域;
3.若飞行器较远,已无法成功飞回飞手所在位置,可以寻找合适降落且易于到达的地点降落,方便后续寻找。

在 GPS 卫星信号差或指南针受干扰、并且不满足视觉定位工作条件时,飞行器将进入姿态模式,它将左右漂移、无法定点悬停和无法自主刹车,这也是导致飞丢的一大杀手。
A. 确保 GPS 定位
确保GPS信号充足、搜星数达到 10 颗再起飞,并时刻保持与周围物体的安全距离,避免信号遮挡影响定位精度。

B. 避开干扰源
1.钢筋建筑物、桥梁、发电站、通讯基站、化工厂等强磁场环境下,容易对指南针产生巨大干扰。
2.当所在城市正在举办大型展会、烟花表演等活动时,空域可能受到监管,存在信号干扰设置,请务必提前了解当地飞行管理规定并谨慎飞行。

在正常飞行时,也不要大意,在途中受到撞击往往也是导致飞丢的罪魁祸首。
A. 熟悉避障原理
“不是有避障吗?怎么就炸机了呢”。
实际上,视觉系统与红外传感系统只在有限条件下发挥安全辅助作用,比如视觉系统无法识别没有纹理特征的表面和非常细小的物体,及在暗光和强光环境下无法正常工作。
由此可知,我们应该尽量不要贴近水面飞行,也要当心电线和树枝等障碍物。
*查阅对应机型的用户手册,详细了解其避障原理和特性。

B. 确保遥控信号
遥控器连接飞行器的 WIFI 信道,在建筑密集区域容易被同频段的信号所干扰,或被建筑物阻挡而导致图传信号断链。

C. 注意飞行视野盲区
朝 FPV(第一人称主视角)视野盲区飞行时,必须在悬停时通过操控航向杆调整飞行器航向,从而做到“眼观六路”,同时确保足够距离内的障碍物显著低于飞行高度。

总而言之,只要我们多观察、多练习、多总结,就一定能避免飞丢意外的发生!
2025-04-30 11:19
2025-04-30 11:18
2025-04-29 14:05
2025-04-29 13:46
2025-04-29 13:44
2025-04-28 13:44
2025-04-27 11:13
2025-04-27 11:01
2025-04-24 10:38
2025-04-24 10:30






































