利用在不同高度进行的两次无人机飞行以及在测量现场设置的 GCP,本项目提供了一个独特的机会来生成和比较几种不同的无人机点云。这可解决下述三个问题:
1)仅靠 RTK 飞行能否达到 GCP 的精度水平?
通过对比启用 RTK 的飞行与使用本项目 GCP 飞行的点云,有可能分析出仅在 RTK 模式下飞行(例如,未使用 GCP)时是否可以实现 GCP 水平的地理空间精度。
2)飞行高度/GSD 对点云质量有何影响?
通过比较在不同高度进行的两次无人机飞行的点云,可评估分辨率对点云质量的影响。
3)照片数量对点云密度有何影响?
通过合并本项目 100 米和 150 米高飞行的点云,可分析数据处理中所使用的照片数量对点云密度是否有直接影响。
3.1点云分析
考虑到地面扫描和无人机方法的精度,本部分最好分为相对精度和绝对精度。无人机的绝对精度可以通过使用地面控制点 (GCP) 或通过对无人机飞行进行 RTK/PPK 校正来获得。同时,无人机图像所得结果的相对精度取决于其图像的分辨率,该分辨率与飞机的飞行高度直接相关——高度越低,点云越密。
地面激光扫描仪 (TLS) 的绝对精度取决于所使用的仪器定位方法;在本项目中,所用方法为“自由站点”法,即直接利用测得的(三个)GCP 的精度来确定每个 TLS 站点的位置。利用 TLS 测得的点的相对精度与测角精度和电子测距法 (EDM) 的精度直接相关。
由于无人机的相对精度和绝对精度已知有几厘米误差,而 TLS 的精度可达到几毫米,因此我们可以认为由 TLS 得到的点云先验精度较高。出于这一原因,并且由于 TLS 数据采集可实现比无人机更高的点密度(在 TLS 的中等密度设置下),我们决定以 SX10 得到的点云为参考,来对比不同的无人机点云。
在 CloudCompare 和 Autodesk AutoCAD Civil 3D 2015 中对以地理坐标为参考的 SX10 点云和四个无人机点云进行了分析(图 6)。
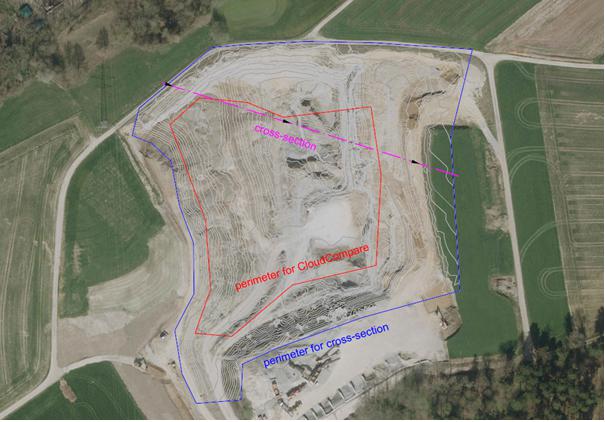
图 6:用于对比的区域地图
在 CloudCompare 中,使用一个名为 M3C2 的函数进行分析。该插件可直接计算两个点云之间的带符号(和稳健)增量,是一种先进的算法。然后用均值和标准差对三维差异进行了比较(表 3)。
同时,在 AutoCAD 中使用相同的基面对所有点云进行了体积比较(表 3)。然后对以该表面为基准的切割和填充体积进行了比较。
CloudCompare 和 AutoCAD 的数值结果见表 3。每个数值代表对某个特定的无人机点云与激光扫描仪点云进行的对比。
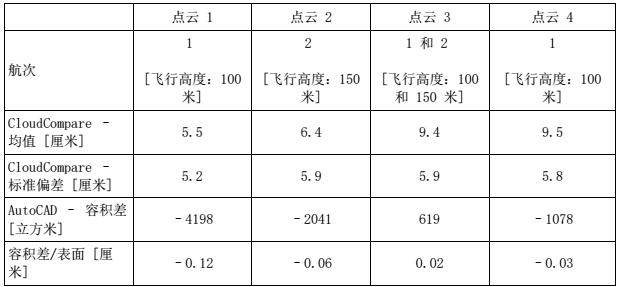
表 3:Trimble SX10 采集所得点云(我们的参考点云)与 eBee Plus UAV 采集所得的四个不同点云对比结果列表。
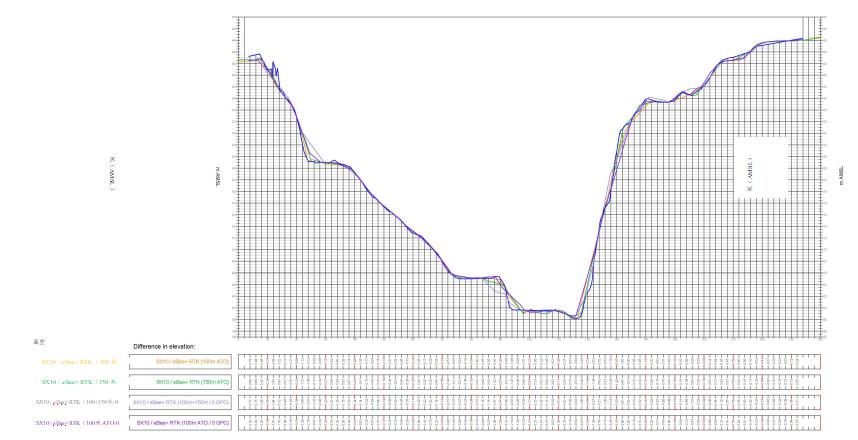
图 7:使用砾石坑最深部位的一个横截面在 AutoCAD Civil 3D中 进行了第三次也是最后一次对比。
4.结果
4.1数值结果
数值比较的另一种形式是比较每组点云中点的数量(表 4)。

表 4:不同点云中点的数量
将 100 米与 150 米高无人机飞行合并所得点云包含的点数与 100 米飞行点云的点数相似。这是因为合并处理的两次飞行的图像使用的是与 100 米飞行完全相同的图像处理设置。
4.2数据采集所需时间
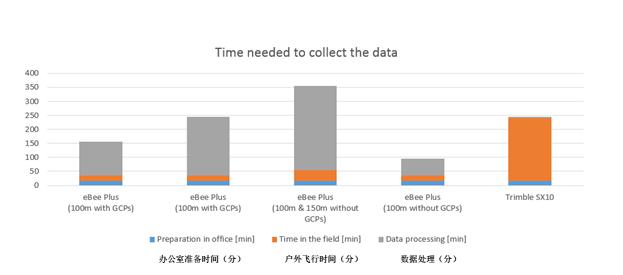
图表 1:数据采集所需的总时间。
4.3
点云的截图
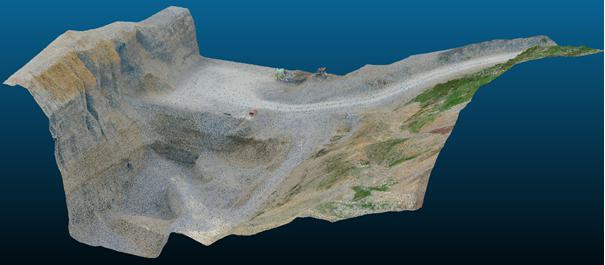
图 8:TLS 点云的截图
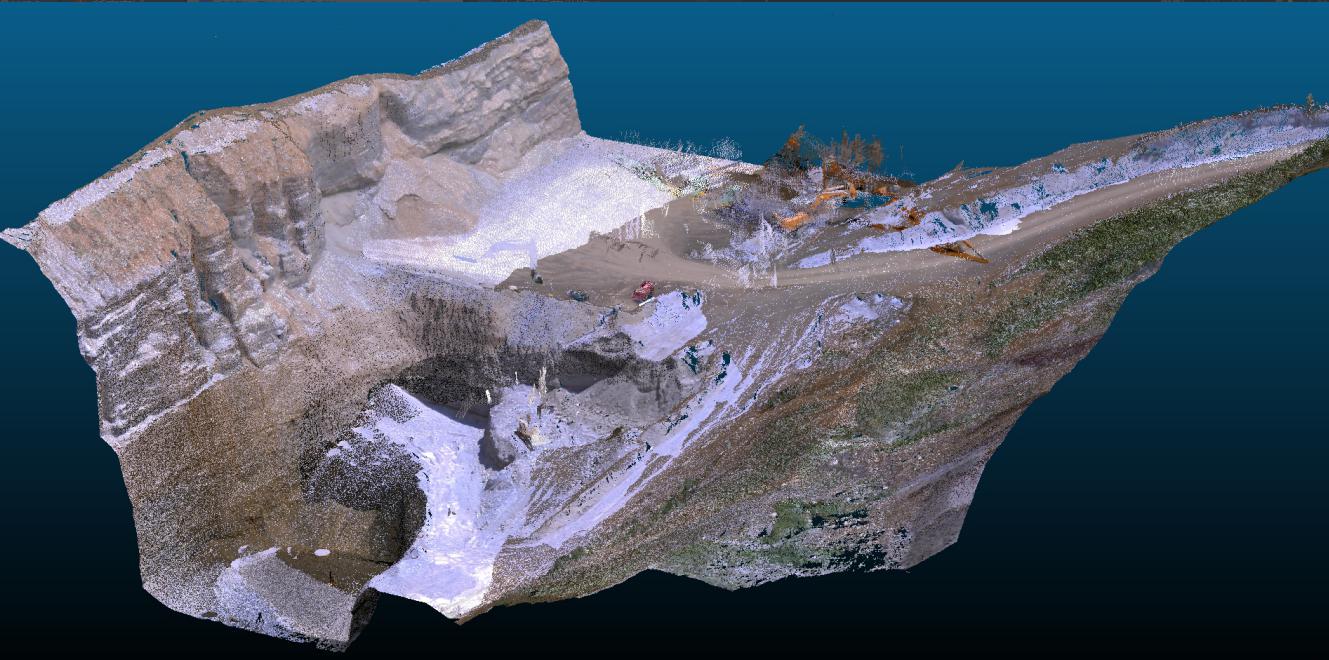
图 9:100 米/不使用 GCP 无人机点云的截图
4.4讨论
虽然 GSD 对云密度的影响正如预期的那样得到了证实——即,GSD 较高的点云中有更多点——将在不同高度进行的飞行进行合并(需处理图像数量加倍)并未带来任何明显的好处。平均 GSD 并没有更精确,点云未包括更多的点(由于合并和处理的图像使用的是与单次 100 米飞行相同的设置),而整体处理时间更长。
对于仅在 RTK 功能支持下进行飞行是否可以获得与使用地面控制点 (GCP) 的飞行相同的绝对精度这一问题,事实证明是有可能的。对于使用 GCP 的点云而言,各次飞行的平均偏移量要比搭载 RTK 但未使用 GCP 的飞行少几厘米。四次无人机数据处理所得的标准偏差均相同。这意味着在整个项目期间,所有处理方法都给出了恒定的精度。
关于捕获点的数量——点密度——尤其是每平方米的平均点数,无人机飞行产生了足够高的细节级别 (LOD),可以用来测量采石场等场地。与此同时,TLS 提供了更高的细节级别,可用于更小、要求更高的项目,例如数字环保制图。此外还有一点比较重要,就是两种情况下(无人机和 TLS)点的密度都是均匀的,也就是说每平方米的最低和最高点密度之间差异很小,其与最终细节级别的相关性比与平均点数的相关性更高。
尽管 TLS 和无人机(图 1)的准备时间相差无几,但是无人机在场地上花费的时间明显较短(在砾石坑上空飞行一次所需时间要少大约 10 倍)。在后期处理方面,无人机图像处理时间是一个需要考虑的因素,但是使用 GCP 时这一时间明显增长——与仅在 RTK 模式下飞行的时间相比,大约要长 50%。
就每种技术(图片 1)所需的总数据生成时间(采集和处理)而言,在开启 RTK 模式且未使用 GCP 的飞行情况下,这一时间是 TLS 相应时间的三分之一。在单次飞行高度为 100 米、使用 GCP 的无人机飞行情况下,这一时间可节省大约 40%。
5.结论
本遥感项目的目的是比较由 TLS 与无人机图像生成的点云;特别是通过评估每个点云的数据采集效率性和评估每个点云的最终质量。

表 5:主要发现总结
5.1效率
在不需要使用 GCP 的情况下,使用启用 RTK的eBee Plus 无人机在项目场地采集点数据的效率是 TLS 的两倍多(图片 1)。在无 RTK 飞行的情况下,两种飞行(100 米和 150 米)仍明显快于 (40%)TLS 方法。
在数据处理方面,TLS 无需进行数据处理,只需将一份文件从仪器上拷贝到电脑上。相比之下,无人机图像必须进行复制和处理,该过程约需花费一个小时到三个半小时,具体取决于飞行高度(表 2)。但是,我们必须注意到的是,摄影测量处理时间只是电脑时间——开始后,处理过程便可自动进行。因此,员工仍旧可以做其他事情,例如计划或执行更多的无人机飞行。
将现场时间和处理时间相结合时,比较每种技术的总数据采集时间(表 5)可以发现,在类似本项目的砾石坑测量中,启用 RTK 的 eBee Plus 的整体效率要高于 TLS。因此,对于此类场地来说,无人机是一种更加有效的方法,可以减少测量团队的数据采集工作量。因此,无人机可使此类机构减少人力资源成本、提供更具竞争力的价格和/或在一定时间内完成更多的项目。
5.2绝对定位精度
我们可以得出结论,无人机无需使用 GCP 即可获得较高的绝对精度(表 3),其原因是 senseFly 无人机和瑞士 VRS 系统可使图像具有较高的地理坐标精度。这一点可通过比较使用 GCP 和仅使用 RTK 功能的点云与 TLS 点云得到证实;偏移量很小,而且所有的比较结果均显示相同的标准偏差,即整个项目过程中一直存在噪点,无论是否使用 GCP。
5.3点云质量
点云的质量可通过观察点密度和噪点情况进行评估。TLS 点云中的点密度非常高,但是上文进行的比较显示,无人机的低密度点云获得的结果与之相似。因此我们可以得出结论,虽然无人机点云与 TLS 点云(设置为中等密度)相比提供的细节更少,但是对于大多数典型的测量程序而言,其仍提供了足够的细节。
虽然未对各个点云的噪点进行评估,但是通过比较不同的无人机点云与 TLS 点云(将这些点云依次重叠)可以发现,其具有相同的标准偏差和最小偏移量。因此,我们可以得出结论:所有这些来源的噪点都很小且不具相关性——所有点云都是完全可用的,它们的衍生产品,例如 DTM(数字地面模型)、体积等,都不受影响。
5.4总结
对于需要最高细节级别的测量项目来说,例如小型场地的数字环保项目等,激光扫描方法无疑是最优选择。
对于较大的项目,例如本项目的砾石坑或类似规模的采石场或建筑工地,启用 RTK 的无人机技术不仅可以提供可接受的点云细节等级,而且效率更高。除此之外,由于测量人员无需穿越场地,因此无人机方法还可以潜在地提高工作人员的安全性。
对于本项目的砾石坑场地而言,从效率和质量方面考虑可以得出结论,最佳的数据采集方法是 RTK 无人机低空(100 米)飞行(不使用 GCP)。该方法花费的图像处理时间最短,可获得较高的绝对精度和可接受的点密度,同时将现场风险最小化。
无人机与 TLS 数据采集方法之间另一个值得注意的区别就是保存和未来重新加载无人机自动飞行计划的能力。这一点可确保在长期监测某一场地时后期数据的一致性,例如计算从某一周或某个月到下一周或下个月的容积差。相比之下,TLS 方法需要控制点,如果控制点未固定到位,那么设置这些控制点会非常耗时。
无人机提供的额外免费视觉数据(航空二维正射形式(正射像片),图像处理完毕后生成)颇具价值。这种数据可作为点云或数字表面模型的有力补充,提高客户满意度。
最后一点,同样也是值得注意的一点,从成本方面考虑,目前(2018 年 1 月)瑞士无人机的零售价格(表 5)约为 TLS 的三分之一。
简历
Armin WEBER,瑞士苏黎世联邦理工学院测绘学硕士,Lerch Weber AG 公司共有人
Thomas LERCH,瑞士西北应用科技大学 IT 学士与测绘学学士,Lerch Weber AG 公司共有人















