捷克技术大学的多机器人系统(MRS:Multi-robot Systems)小组于2018年11月发布了一种基于紫外标记的新型视觉相互定位方案。
无人机集群内相互定位的典型挑战是:如何提供一种低成本、不依赖于基础设施的解决方案,以适用于室内外环境以及合理的距离范围。当前的解决方案提供精确的集群内相互定位信息,主要依靠红外线闪烁标记、地面摄像机、室外全球导航卫星系统等。但也有其缺点:需要预先安装基础设施,并且只能在已知、整洁的环境中使用。此外,由于这些方案成本高昂,并且依赖集群成员之间的密集无线电通信,容易受到无线通信频段限制和相互干扰,难以扩大集群规模。
可见光波段的视觉检测方法可以解决上述问题。如果设定为室内环境,可以使用颜色标记。颜色标记在受控的照明条件下易于区分,但无法在复杂照明条件下或者色彩丰富的室外条件下使用。其缺点在于需要大量的标记,并且计算复杂,对照明条件敏感。
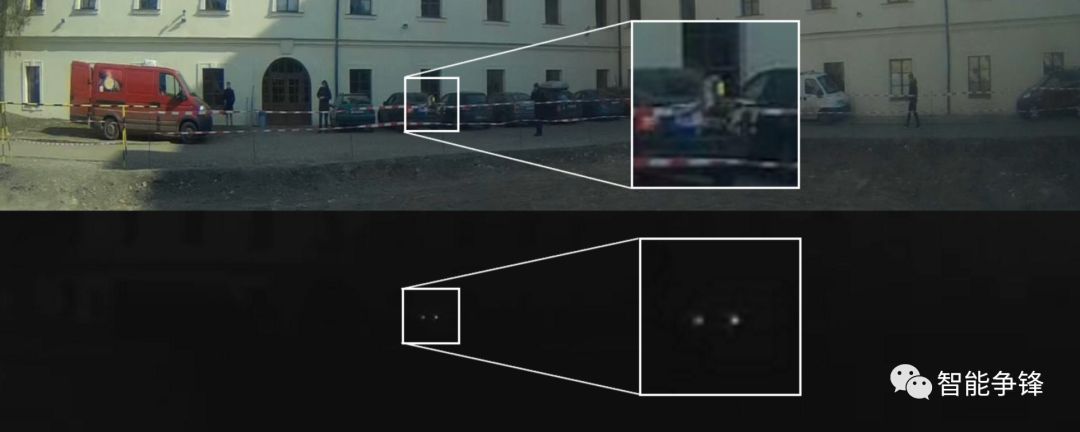
城市背景下,远处阴影里的无人机,在可见光谱谱段几乎不可见,但在紫外光谱中明显。
MRS小组的解决方案是:在原研究基础上,创新性地采用了紫外谱段的图像,进行视觉相对定位。
与可见光谱段相比,太阳和大多数人工光源在近紫外谱段的辐射量都比较少。该方案使用紫外标记和装有紫外带通滤光片的标准相机,可以在复杂环境中快速检测标记物。为了检测方向或身份(ID)信息,MRS小组以闪烁模式标记个体ID信息,使用新型的3D“时间-位置”霍夫变换进行检索。该算法也是首次使用霍夫变换对目标进行实时跟踪。

紫外敏感相机的图像
室外实验结果显示出这种算法的优异检测可靠性:在包括天空、树木和建筑物在内的多种背景中,闪烁信号都能被解码。理论上可以预测,该解决方案将在机器人集群和多机器人系统中得到广泛应用。















