C-UAS
不同的C-UAS系统依赖于各种探测和/或拦截无人机的技术。本节介绍目前市场上的产品所采用的主要检测和拦截方法,以及主要的平台类型。
根据2017《世界陆军装备技术发展报告》,反无人机作战应当包括探测、甄别、响应和报告无人机威胁的技术。相关技术包括:集成与网络传感器,构筑了解敌军威胁的无人机态势感知能力;实现机动化以便提供最佳探测位置;共享通用作战图;开展侦察行动;确保与空域管理、航空人员保持联络;与情报战或电子战单位协调作战。多层级计划、协调和集成为指挥官提供了基于传感器计划、收集计划和发布计划的反无人机通用作战图。其中,传感器计划应当包括:雷达、声光器件、形成无缝集成传感器网络的人工能力。采集计划由具备建制无人机能力的旅级及其以下单位建立,致力于遂行侦察监视任务和情报作战,满足指挥官关键信息需求。在《反无人机系统》的报告中,主要关注探测和跟踪系统、拦截和平台类型。
探测和跟踪系统
《反无人机系统》探测和跟踪系统使用传感器技术

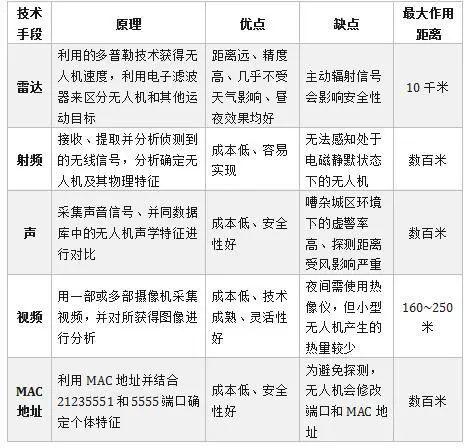
雷达、射频、光电、红外等不同的探测技术各有优缺点。许多经济实惠的电光传感器仅限于日光操作和目标的直接视线,这对于红外(IR)和许多射频(RF)系统也是如此。射频和声学传感器使用已知声音和频率的数据库来探测无人机,但新无人平台的快速发展使得这些数据库无法完全更新。传感器的灵敏度也是一个问题:过于敏感会产生许多误报,而灵敏度降低会导致漏报。这里给出《世界陆军装备技术发展报告》中无人机探测技术对比表格,以进行参照。
《世界陆军装备技术发展报告》中
无人机探测技术对比