提醒
外业飞行易受环境因素影响,风速会直接影响飞机航速,最小拍照间隔建议设置为1.5s,以避免恶劣天气影响飞机航速而引发的相机拍照异常,提高拍照质量。
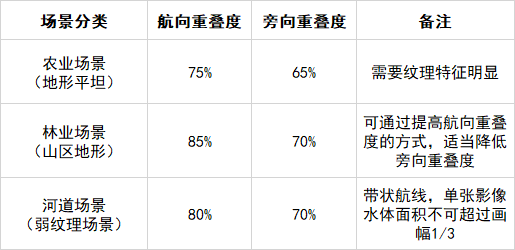
重叠度设置
MS600 Pro相对于大疆标准光学负载而言像素少、影像多,需要更高的重叠度要求才可保证数据准确性,对于不同场景我们推荐以下重叠度指标:
航高设置
航高与相机参数以及地面分辨率要求相关,可利用以下公式计算航高:

提醒
为保证一体化成图,航高需大于3倍最大高差,若存在航高差距过大的区域,应对该区域执行航摄分区,并单独执行航线采集。
航速设置
航速的设置需考虑无人机性能、载荷最小拍照间隔限制与重叠度限制,航速参考与拍照临界限制可根据公式具体计算:
V ≤ [(1-航线重叠度)*像幅长] / 最小拍照间隔
设计航速V(m/s)时,需同时满足公式中要求。建议:多旋翼航速6-8m/s,且航高需要≥80m;固定翼航速16-22m/s,且航高需要≥200m。
天气、时间条件
无人机多光谱遥感作为泛测绘领域的一个分支,需同时遵照航空摄影测量与光谱遥感对于外界环境因素的指标限定,主要包括以下几点:
(1)若为山区作业,风力不可≥3级;平原作业,风力不可≥4级。
(2)为保证光照充足,需选择光照稳定的条件飞行,阴天、光照变化大的情况,不可飞行采集。
(3)需同时考虑太阳高度角与方位角限制,选择临近正午的时间作业,避免阴影遮挡、光照强度太弱引起的数据质量差的问题。
提醒
欢迎咨询长光禹辰,获取不同经纬度地区详细的拍摄时间矩阵。
灰板拍摄
灰板用于校准标准反射率,每次任务起飞前,均需在地面拍摄2-3次影像;若单次飞行时间超过30min,降落后也需拍摄3-5次影像用于校正。
以上是MS600系列多光谱相机使用过程中常见的一些注意事项与外业数据采集技巧,您若仍有任何关于设备使用与多光谱外业飞行的问题,欢迎咨询长光禹辰。
长光禹辰成立于2017年,是一家由中国科学院长春光机所和青岛高新区联合成立的高新技术企业,公司核心团队来自长春光机所空间光学部,在光谱遥感、光电探测领域具有深厚的理论基础和丰富的工程经验,掌握完整的光谱仪器系统设计、先进的嵌入式视觉开发、复杂场景定量遥感智能调光、高精度自动辐射校正、光谱数据半定量反演及应用等核心技术,形成了以MS200、MS400、MS600、AQ600等系列多光谱相机为代表的无人机载光谱遥感硬件产品线、以Yusense Map/Map Plus为依托的光谱数据预处理及分析软件和以Yusense Cloud为依托的端云一体化服务平台,并在农业、林业、生态、环保、警用等领域开展了深入的行业应用。公司专注于无人机航空遥感与光电探测领域,持续推出革新的软硬件产品,落地更丰富的行业应用场景,致力于用技术和产品推动行业进步。















