最近一直在写《零基础学习御mini航拍教程》、《航拍视频培训班》两个专栏。从“双十一”收到机器,到现在为止累计更新了21节专栏课程,这台机器可谓立下了汗马功劳。总体来说,御mini这台机器的功能对于2699的价格来说,已经非常的物超所值。

几年来的部分机器
但是作为有近8年的商拍经验的老飞手,随着对这个机型的深入了解,我也把这个机器的问题看得很透彻。同时也预感到,这台机器将会是大疆消费机型里面炸机丢失最多的一个。

我外场拍摄的所有装备
原因并不是机器不好,而是下面两个原因:
1、价格太低,入门门槛太低,涌入许多无经验的航拍新手。
2、它仍然是一个无人机,所有无人机需要注意的问题,一样都不少。甚至操作技术门槛反而要高于大疆其他一些机型。
今天从操作角度来聊一下占比例最高的炸机原因。这个要从“姿态模式”和“对头飞行”两个方面慢慢道来。
一、姿态模式
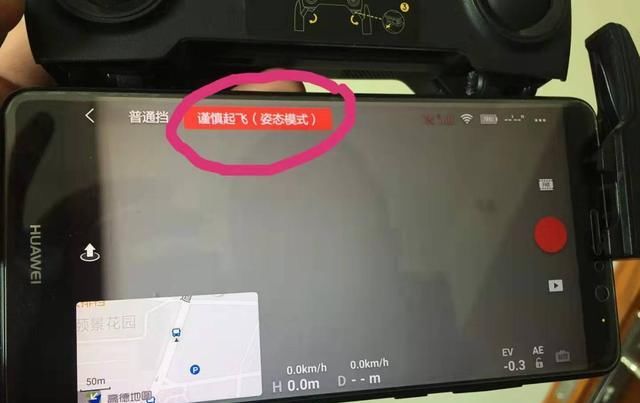
前几天有朋友问我,飞机出现了这个提示能起飞吗?这里就不得不提一下这个“姿态模式”的前生今世。
姿态模式作为一种操作姿态,在wkm,naza,A2这些商用飞控,还有精灵系列的无人机当中都有存在,用户可以自主选择。

我早期一台装了大疆WKM飞控的六旋翼航拍机
在早期的DJI飞控系统中,一直存在三种操作模式,从简到难分别是GPS模式、姿态模式、手动模式。
GPS模式是所有飞行模式中最简单的。现在的GPS模式已经不是简单的GPS参与,大疆把这个档位叫做P档,因为除了GPS参与水平定点,红外、超声波、摄像头,也参与了无人机的定高。经过飞控模拟摇杆中位50%作为悬停油门,并且有上下大概5-10%的死区,在死区内的动作将不被识别,以保证无人机定高稳定,不会因为细微的偏差导致的高度漂移。简单地说,你双手松开遥控器,无人机就会不动,你向右打,它就会向右飞,你松开,它就会停止不动。早期的GPS模式下,无人机会有水平方向大概30-50cm左右的漂移,但是已经基本满足了新手的要求。但是在视觉定位和超声波、红外的参与,无人机的飞行会达到几乎相对静止不动的情况。这种模式对于新手来说,操作无人机如探囊取物般容易,自信心膨胀往往就是从这里培养出来的。如图所示,御mini的三个模式其实都是P档的一种。
GPS模式下,打杆完毕以后,自带刹车,无人机可以精确定点

大疆御mini的三个档位其实都是P档的一种,也就是有红外和下视参与的GPS模式
手动模式是新手可能无法理解的一种模式。对于飞直升机的朋友来说就非常简单了。手动模式中,油门是实际油门,不像在gps模式中,飞控给你模拟了一个50%作为悬停油门,而是根据实际输出大小来进行油门输出。所以不要说水平方向,连油门悬停都是一个困难的情况。而水平方向的操作变为这样一个状态,打摇杆,无人机机身倾斜,松开摇杆,无人机保持当前倾斜状态不再动。这种状况下飞机理所当然的会向倾斜方向加速,越来越快,并且由于机身倾斜,导致油门在垂直方向的分力变小,飞机开始掉高度的。如果需要无人机悬停,则要处于一个不停的上下左右调整的动态过程中。
多轴的手动飞行状态就类似于直升机的操作方式,打杆后不会自动刹车,甚至姿态都不会恢复
姿态模式则是处于两者之间的一种模式。在姿态模式中,悬停油门和GPS模式一样,飞控模拟到了50%,有GPS的参与。唯一的不同之处就是达不到钉钉子般的定点悬停,无人机在平移打杆并松开之后,机身会恢复水平,但是可能出现惯性漂移。或者会因为风的影响进行漂移,或者起飞时的地效影响产生漂移。但是只要你保证打杆正常,对于机器的修正还是可控的。
姿态模式下,机器会随惯性或者随风漂移,如果操作失误或者不操作,极易炸机
现在就出现了一个问题,在御系列消费级无人机中,这个飞行模式被取消了自主选择,但是却会在下面的情况下自动跳入。也就是说,新人对这种操作模式不但没有机会熟悉,反而会在红外和下视摄像头出问题的时候切入姿态模式,而不是简单地切入到没有红外和下视的普通GPS模式。
在部分情况下,无人机会跳入姿态模式
二、飞行方向
无人机的飞行方式分两种,一个是第一人称飞行,二是第三人称飞行。
第一人称飞行就是看着监视屏进行操作。这样的时候操作情况下,操作是不存在问题的。你的任何操作和你监视器中看到的,方向都是相同的,不会有什么问题。也就是说你向左,飞机向左,你向右它向右。

看着监视器飞行,所见即所得
第三人称飞行,就是看着飞机飞了。这是我一直强调大家要锻炼的一种飞行方式,例如前段时间的矩形飞行和手动环绕。多数误操作就是这个问题产生的。
在直升机的训练当中,“四面悬停”是最基础的也是最初期的训练模式。“四面悬停”是对于直升机的操作训练来讲,因为直升机的悬停是动态的,要随时保持正确的操作动作,而对于多旋翼无人机,特别是带GPS模式下的多旋翼无人机,四面悬停已经不是问题,我们可以引申为在“四个方向上的操作”。
四个方向分别是“对头、对尾、对左、对右”。也就是操作人员所面对的机身位置。其中“对头”操作是相对来说比较容易出错的。
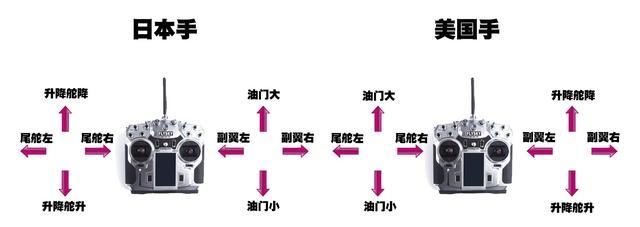
例如在日常操作中,对尾的情况下,美国手的右侧摇杆,前、后、左、右分别代表了机身的前进、后退、左移、右移,和人的观察方向是完全相同的。但是在对头的情况下,虽然操作对应移动仍然相同,但是相对于人的观察来说是完全相反的。而在对左、对右的情况下,依然也存在操作方向与飞机移动方向不同的情况。
在对头飞行的情况下,飞机相对于人的移动方向和打杆方向是相反的
那么我们来模拟一下这个事故发生的过程:在激活大疆的自动返航模式下,无人机首先判断飞机是否达到了预设的返航高度,如果没有达到,则会升高到预设的高度再返航,如果高于预设高度,则会直接返航。这时候无人机的第二个动作就是转向,机头朝向无人机返航点,也就是操作人员所在的位置,进行返航,这时候的航向就是对头的。如果在返航点地面刚好出现了地面纹理不清、水面、GPS星数不足,跳入了姿态模式,而此时又恰好是对头返航降落的状态,那么这种对头方向的漂移,对于新手来说,这个状态是非常危险的。
如何避免这些问题呢?
1、最重要的就是做好基础训练
矩形训练、圆形训练、8字形训练都是增加手感的好办法。我们老飞手以前的时候,在工作中很少使用失控返航功能,多数都是手动把机器拉回来,但是在图传失控的情况下,空中的无人机只剩一个小黑点,但是我们通过随意打杆,就可以判断飞机的朝向,直接在当前机器朝向的情况下把飞机拉回,对头飞行更是基本功。
手动环绕训练
2、选择合适的起飞点。
所谓君子不立于危墙之下,在起飞时就挑选一个干扰小,足够空旷的位置飞行,提前远离各种危险和复杂情况,是一个老飞手基本的素质。手上起飞,手上降落不是真本事,平平稳稳降落,安安全全取到资料,才是成功者。
3、在降落到低空前,首先把方向调至对尾。
这是我2013年一次降落的飞机视角的视频,可以看到我降落已经非常流畅了,但是我到最后依然做了一个转向的动作,把飞机方向调成对尾。
看人物走路速度可以知道我没有加速,但是我最后还是做了个掉头的动作,保证飞机降落时对尾,避免误操作
最后,希望大家在飞行中一定要注意安全、注意安全、注意安全!祝各位新人,总有一天熬成婆,像我一样,飞自己的飞机,看新手的热闹。















