
固定翼无人机的回收在飞行器领域是个难题,除了极个别造价昂贵、技术先进的无人机(如:捕猎者、全球鹰)可以自主着陆外,其他无人机的回收方式比较多样。今天给大家介绍一种小型无人机普遍采用的回收方式一一撞网回收。

图注: “杀人蜂”无人机发射(左)与回收(右)
无人机撞网回收系统工作原理
无人机撞网回收是一种理想的精确定点回收方式,特别适合固定翼无人机在狭窄回收场地或舰船上使用,可以认为它是一种零距离回收方式。撞网回收可适用于中小型舰船,回收网通常在舰船尾部展开,其高度高于舰尾,飞机直接撞入网中。成功捕获无人机后,通过降低网的髙度,然后人工把无人机从网中移走。撞网回收不需要像常规跑道着陆那样锚要精确保持下降速率,但需要精确控制着陆点,维持尽可能低的进场速度。
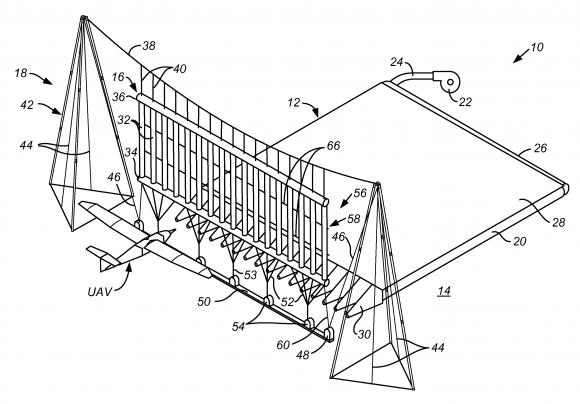
图注:无人机回收网机构示意图
无人机撞网回收系统关键技术
撞网回收系统由拦阻网装置、吸能缓冲装置和末端引导装置等组成,其核心技术在于如何引导无人机准确地飞向拦阻网,触网后如何柔和地吸收能置,从而平稳、准确地实现撞网回收。国外对撞网回收的无人机末端引导技术的研究应用主要有以下几类:雷达引导、激光引导、GPS组合引导和电视跟踪引导等。其中,基于激光引导的典型应用为瑞士空军使用的目标定位和跟踪传感器自动引导系统;基于GPS 组合引导的典型应用有美国的Piccolo自动着舰系统,该系统用于“银孤”无人机的自动着舰撞网回收。

图注:银狐无人机撞网回收系统















