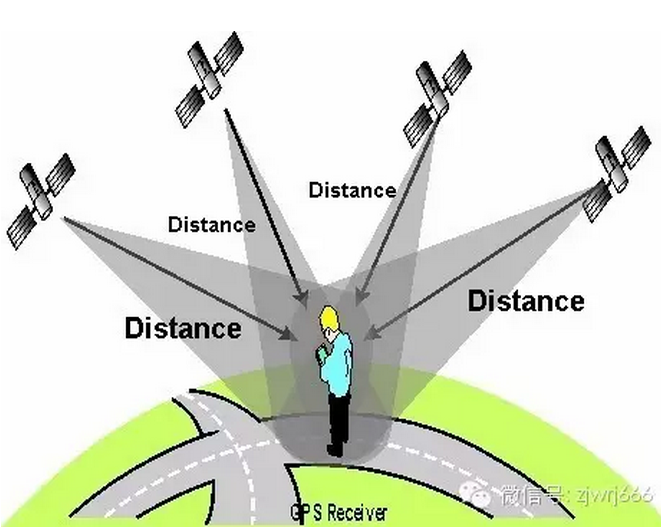
GPS是英文Global Positioning System全球定位系统的简称,其利用GPS定位卫星,在全球范围内实时进行定位,导航。GPS导航系统的基本原理是测量出已知卫星到用户接收机之间的距离,然后综合多颗卫星的数据就可知道接收机的具体位置。
GPS导航飞行
当接收机开机时,其内部首先自检,通过后开始工作,当接收机工作后根据规定的通信协议,向外输出无人机的经纬度,速度,高程等信息,这些数据是无人机进行导航和制导的必要参数,飞控要参考飞机当前的经纬度以及下一个航点的经纬度,通过制导算法实现两个航路点之间的航线指引。
GPS误差来源及修正
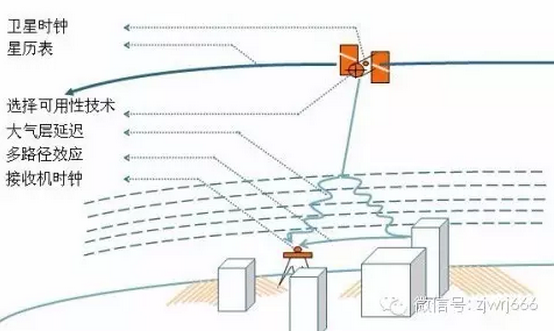
在GPS定位中,存在三部分误差:一是接收机公有的误差,如:卫星钟误差、星历误差等;二是传播延迟误差,如:电离层误差、对流层误差等;三是各用户接收机所固有的误差,例如内部噪声、通道延迟、多径效应等。为了减少这些误差对观测精度的影响,多采用差分定位技术。
差分技术(DGPS,Differential GPS)就是在一个测站对两个目标进行观测值求差;或在两个测站对一个目标进行观测,将观测值求差;或在一个测站对一个目标的两次观测量之间进行求差。差分的目的是消除公共误差,提高定位精度。例如:将一台GPS接收机安置在基准站上观测,根据基准站已知的精确坐标,计算出基准站到卫星的距离和由于误差的存在基准站接收机观测的伪距离之间存在一个差值,这个差值(改正值)由基准站实时地发送出去,用户接收机在进行GPS观测的同时,也接收到基准站的改正数,并对定位结果进行修正消除公共误差。差分技术可完全消除上述的第一部分误差,可消除第二部分误差的大部分,但无法消除第三部分误差。由于这种技术能提高定位精度被广泛地应用。
根据差分GPS基准站发送的信息方式可将差分GPS定位分为三类,即:位置差分、伪距差分和相位差分。这三类差分方式的工作原理大致相同,都是由基准站发送改正数,由用户站接收并对其测量结果进行改正,以获得精确的定位结果。所不同的是,发送改正数的具体内容不一样,其差分定位精度也不同。
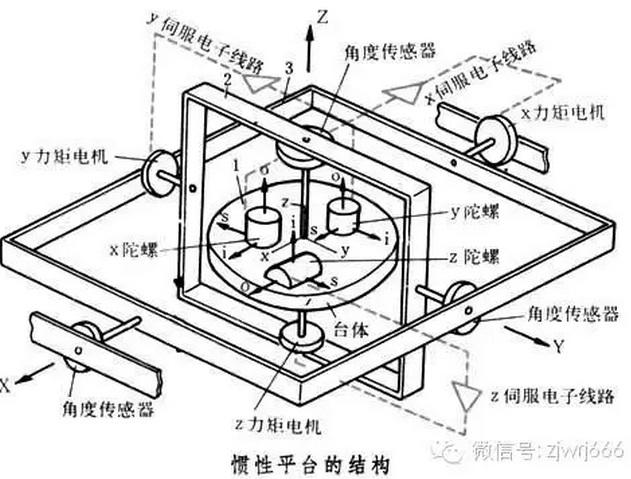
惯性导航
惯性导航,是利用陀螺仪和加速度计这两种惯性敏感器,通过测量船舶加速度和角速度而实现的自主式导航方法。
惯性导航系统属于一种推算导航方式.即从一已知点的位置根据连续测得的运载体航向角和速度推算出其下一点的位置.因而可连续测出运动体的当前位置。惯性导航系统中的陀螺仪用来形成一个导航坐标系使加速度计的测量轴稳定在该坐标系中并给出航向和姿态角;加速度计用来测量运动体的加速度经过对时间的一次积分得到速度,速度再经过对时间的一次积分即可得到距离。
惯性导航系统有如下主要优点:
(1)由于它是不依赖于任何外部信息.也不向外部辐射能量的自主式系统.故隐蔽性好且不受外界电磁干扰的影响;
(2)可全天侯全球、全时间地工作于空中地球表面乃至水下;
(3)能提供位置、速度、航向和姿态角数据,所产生的导航信息连续性好而且噪声低;
(4)数据更新率高、短期精度和稳定性好。
其缺点是:
(1)由于导航信息经过积分而产生,定位误差随时间而增大,长期精度差;
(2)每次使用之前需要较长的初始对准时间;
(3)设备的价格较昂贵;
(4)不能给出时间信息。
无人机爱好者对于GPS一定要注意以下几项:
1,安装GPS时,GPS正方向一定要只想机头方向即和飞控方向保持一致。否则在自动悬停模式下将严重画圈,不能自动悬停。
2,安装GPS时,GPS必须加高放平,远离能产生磁场的设备(比如电池线,图传发射机,不带外壳的摄像头)。
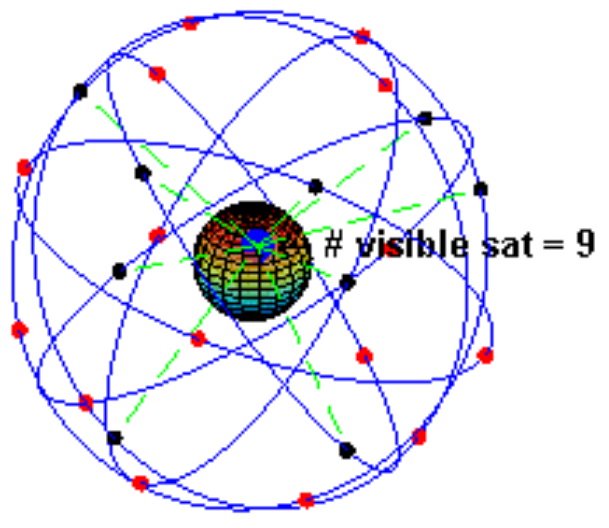
3,在外场飞行,尽量等到GPS搜星超过7颗星再起飞
4,GPS是震荡易损件,炸鸡后一定要检查GPS是否损坏,损坏的要及时更换,防止二次炸鸡。















