CES 2016 过去两个多月了,展会期间出尽风头的 Yuneec在自家产品受到质疑后一直没有做出过正面回复。质疑的原因是英特尔 CEO 科再奇亲自发布的台风 H 无人机自动避障功能太过完美,完美得很不真实。
空中没有障碍物时,紧紧地跟随在骑行者后面,而当行进途中的树干突然落下时,它又能灵巧地避开。
Yuneec本身是一家老牌的航模企业,1999 年在香港注册成立,总部位于上海松江,共有两块业务,分别是 Yuneec(昊翔)自有品牌,以及提供 OEM/ODM 生产方案。2015 年 8 月份,英特尔 6000 万美元投资 Yuneec。
CES Demo 的后续发酵你可能已经知道了,有技术人员发现骑行者头盔顶部和台风 H 演示机上多出的白色小球,与光学动作捕捉系统中使用的马克点非常相像,也进而让人怀疑它的飞行和跟随是通过光学追踪来完成的。

Yuneec无人机/图 来源网络
事后,英特尔和 Yuneec大方地承认是通过光学动作捕捉和模拟的 GPS 信息实现自主跟人,而非 RealSense。也就是说 RealSense 在这其中的作用只剩下避障了,自主跟随仍旧通过传统的 GPS 完成。这并非是说英特尔精心准备的黑科技毫无亮点可言,至少英特尔平台的计算能力已经足以让众人侧目了,毕竟跟随追踪和自动避障涉及到大量的实时 CV(Computer Vison)处理,并不是每一款处理器都能承担起这项工作。
即便有质疑,Yuneec的台风 H 在媒体和无人机爱好者中还是有着很高的期待的。
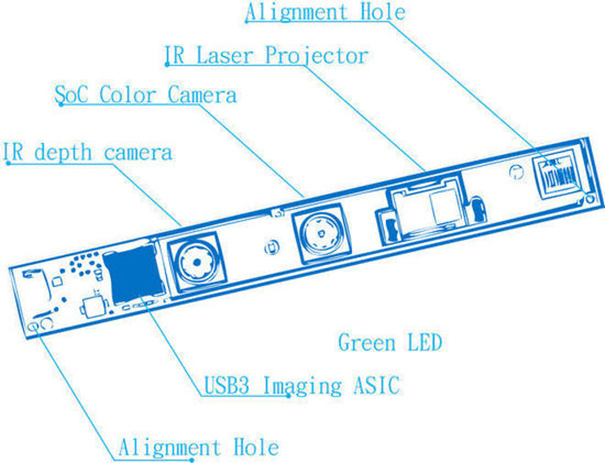
再复习一遍英特尔力推的 RealSense 的工作原理:
一般有三个重要的组件,分别是传统的 RGB 摄像头、红外摄像头以及红外发射器。RGB 摄像头负责捕捉 2D 画面信息,后两者结合,通过计算前方红外线物体的反射量确定物体距离摄像头的距离,也就是深度,得到三维图像信息。整体的原理与微软的 Kinect 接近。这也就是为什么英特尔在演示 RealSense 技术的时候,其形式和 Xbox 的体感游戏类似了。
RealSense 模组/图 来源网络
用在无人机上,RealSense 技术可能需要做一些优化和调整,具体细节如何目前还不得而知。有机器人创业者表示,“RealSense 的精度和距离成指数衰减,所以不大适合大场景认知计算”。
从视频中很难判定跟随是通过 GPS 还是其它技术手段实现。重点测试的项目还是避障技术,人手靠近无人机,它会自动后退(画面前几秒),在跟随的过程中遇到树枝会自动绕行,每次测试中绕行选择的路线也比较灵活。根据媒体同行的测试,作为目前最火的无人机品牌,大疆刚发布的精灵 4 上只能在自动返航的过程中实现自主避障绕行,跟随的过程中只可做出避障的动作(悬停)。
不过,测试中台风 H 整体的流程度并不如早前的 Demo 中那般优秀,可能与环境的光线和复杂程度都有一定关系,也无法排除台风 H 有没有在 RealSense 之外附加上超声波组成复合避障系统。当然,台风 H 测试中的这些特性能在量产版机型中会否打折扣还很难说,毕竟它还处在预定阶段,
而关于无人机避障系统,有超声波、TOF、机器视觉和复合避障多种,PingWest 品玩早前就做过一份简单的梳理,有兴趣的读者可以再回顾一下。















