随着科技的发展,以信息化为支撑的系统化操作将成为未来信息对抗的主要形式,“基于快吃慢食的观察-导向-决策-行动(OODA)”成为重要的制胜机制。感知能力是OODA循环的主要环节。通过人工智能技术赋能感知系统,可以抓住机会控制局面,带动后续环节高效运行,缩短循环求解时间,为信息对抗提供机会和关键支撑。无人机机动性强,视野宽广,因此可以快速感知地形并捕获目标。无人机将采集到的感知信息传输给UGV,可以大大加快任务的执行效率。具有不同自动化水平的无人机也传输不同级别的数据,如图1所示。
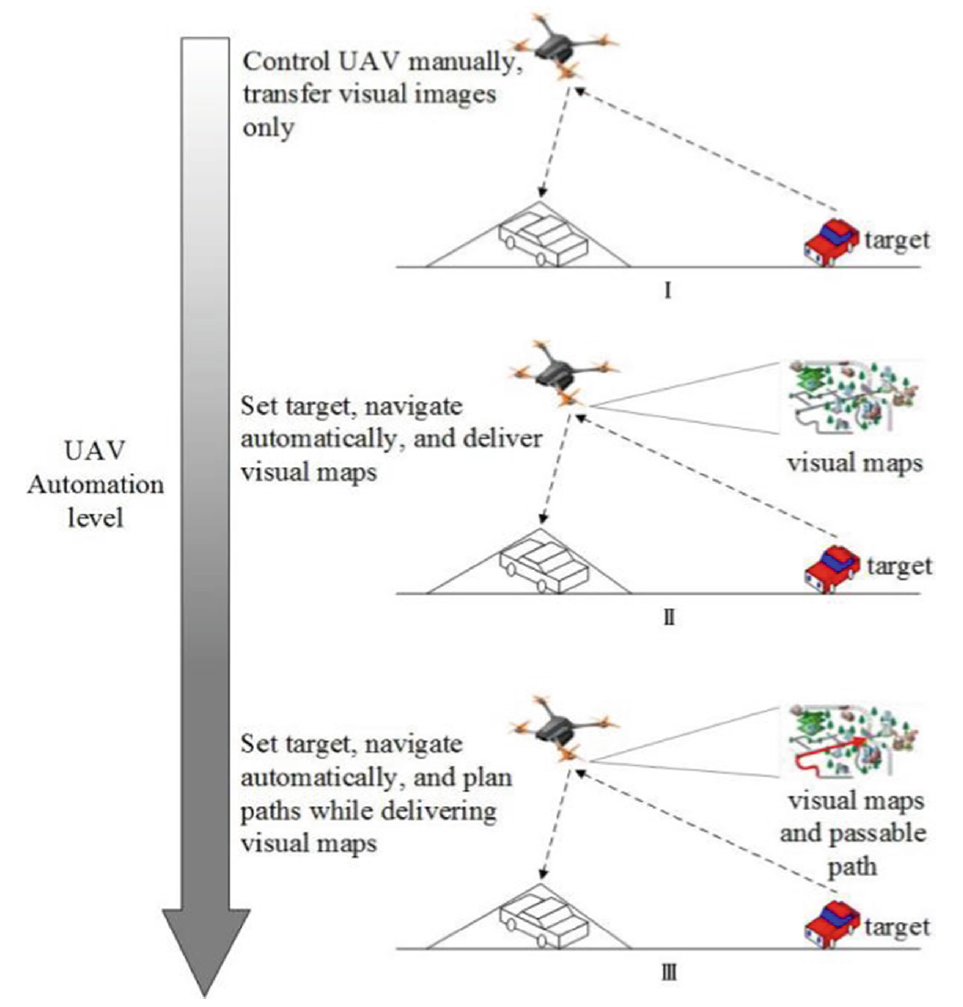
图1 空地协同系统下无人机的不同自动化水平
空地协同无人系统包括空中无人机、地面无人飞行器和地面站系统。无人机配备单目摄像头,集成机载计算单元,可实时获取无人机的姿态流和采集到的图像数据。无人驾驶车辆集成了传感器系统和控制系统,可以进行自主路径规划和轨迹跟踪。地面站系统负责无人机与无人驾驶车辆的合作关系、感知数据的融合处理、态势图的展示。通过自组网络无线电的通信模式实现协作系统各单元之间的数据和信息的交互(图2)。

图2 空地无人协同系统
为增强地面无人车辆的自主导航、避障和侦察能力,利用智能无人机感知技术获取环境和目标信息,将智能无人机感知到的环境信息和目标信息实时传输到地面无人车辆。地面无人驾驶车辆在接收到信息后,可以根据环境和前方目标信息提前修正当前轨迹。智能无人机感知系统的技术架构如图3所示。
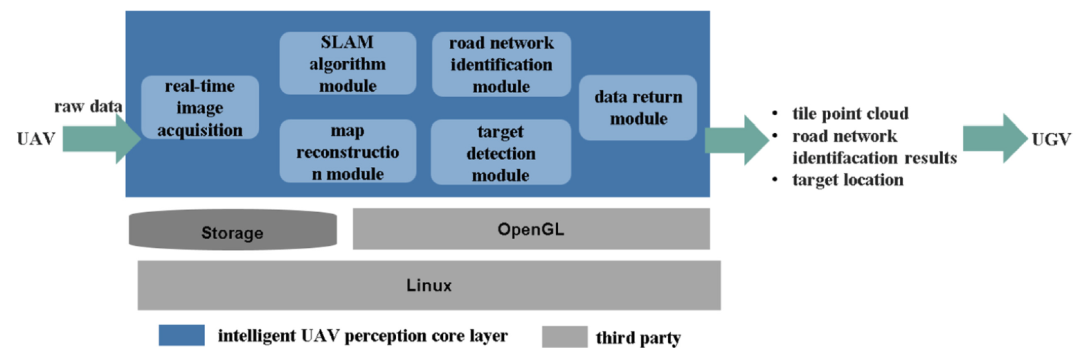
图3 智能无人机感知系统技术架构
智能无人机环境感知技术
① 实时地图构建
采用实时纯可视化地图重建方案,将在线场景地图重建与后处理优化相结合,提高了地图速度,保证了地图的定位精度。首先,利用单目视觉SLAM获取实时姿态信息和稀疏点云,然后在稀疏点云的基础上进行网格重建和纹理映射;同时,利用GPS信息进行定位和构图,输出带有地理信息的地图。最后,通过自适应权重的增量快速拼接算法,实现实时大规模增量拼接图像,并实时显示拼接结果。

图4 实时地图构建后的后处理优化流程
② 路网自动提取
在实时构建地图的基础上,利用基于深度语义分割的路网矢量数据生成技术对路网进行识别和提取,形成可通行的导航地图,有利于无人驾驶车辆的全球路径规划。首先,通过磁贴接口获取平铺图像,进行图像预处理,并对数据进行数据增强。其次,将预增强的图像数据输入特征提取网络进行特征提取;最后,将生成的特征输入像素分类器,生成像素分类结果,并对结果进行融合操作。同时,对融合的结果数据进行矢量化处理,并将其提供给相关的接口调用(图5)。

图5 路网提取数据处理流程
智能无人机目标感知技术
从无人机角度看的目标占地面积小,像素信息较少,与背景难以区分,目标小特征明显。因此,选择了YOLOv5算法,该算法对小目标的精度有显着提高。同时,引入一种名为CBMA的注意力机制,通过学习每个通道的重要性,为具有重要特征的通道分配更多权重,以避免由于无人机图像中大量相似物体而导致的错误检测和漏检。无人机检测到目标后,计算目标的位置并将其发送到地面无人驾驶车辆(图6)。
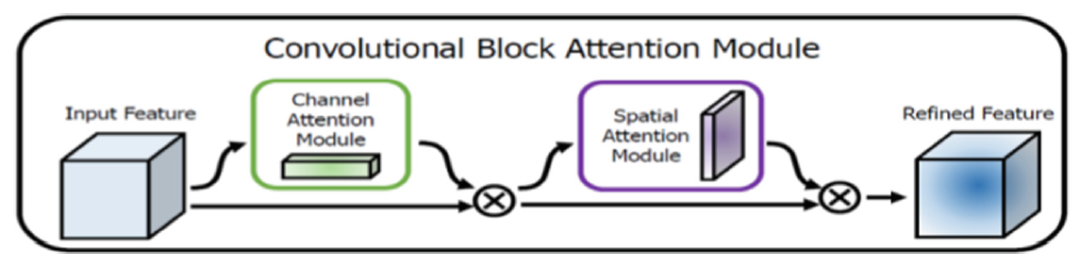
图6 CBAM整体模块化结构
对象检测步骤如下:

图7 无人机物体检测的步骤
如图7所示➀ 显示了第一次实时地图构建的结果和后处理优化的结果➁ 显示了道路网络提取的结果。实时地图构建的耗时满足了空地无人协作系统执行任务的需要(图8)。

图8 实时地图构建、后处理优化和路网提取的结果
该实验数据集采用自主采集方法。通过无人机的实际拍摄,共收集了4247张照片。检测目标在无人机视角上选择相似度高的白色皮卡和白色轿车两种类型。有3947张图片包括汽车和2968张图片包括皮卡车,部分数据可视化结果如图9所示:

图9 目标识别前的可视化图像结果
训练结果如图10所示,其中横轴是训练轮数,纵轴是数值,两者都没有单位。从观察可以看出,损失值和映射值在前期迅速收敛,然后达到稳定。直到训练结束,两个模型的训练效果都不错,没有过拟合和欠拟合的情况。模型的map值达到91.2%,损失值在减小后也趋于稳定,验证了改进策略的可行性。
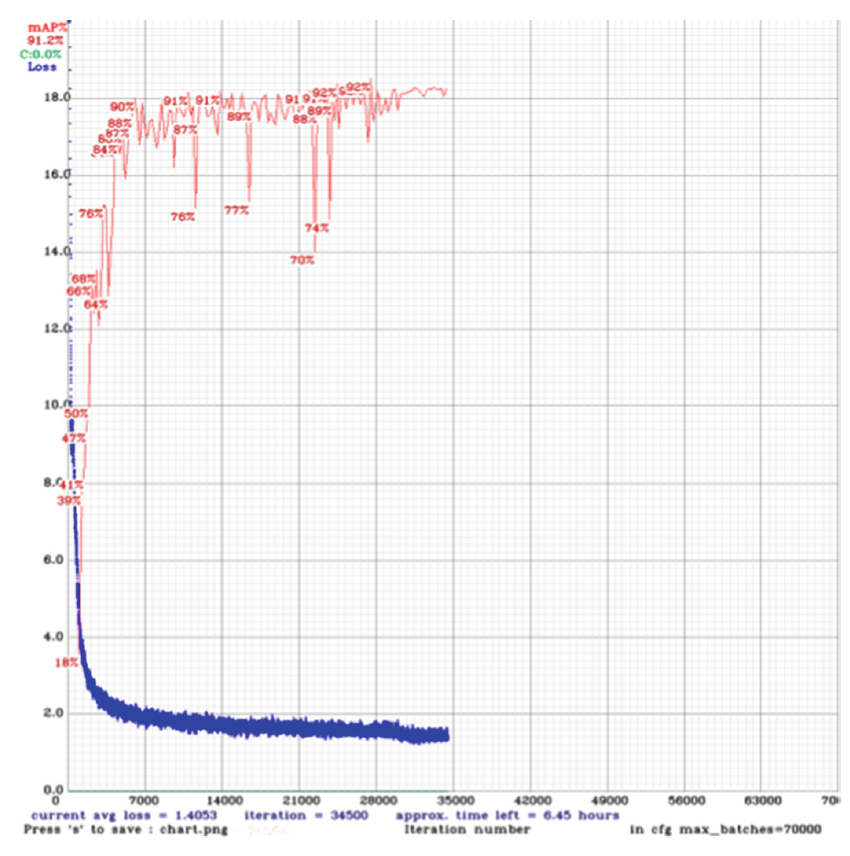
图10 训练结果收敛图
目视检测结果如图11所示,可以看出两类目标被清晰地检测到。绿色盒子是皮卡车,黄色盒子是汽车,实际检测效果极佳。

图11 目标识别后的可视化图像结果
针对地面无人飞行器在野外高动态未知环境下缺乏先验信息,在复杂环境下难以执行任务的问题,提出构建空地无人协同系统,利用智能无人机感知技术提供地图、路网、 目标位置等。它可以引导地面无人车辆快速接近目标,有效提高地面无人车辆的自主导航、避障和侦察能力。
源自:https://doi.org/10.1007/978-981-99-0479-2_360















