可靠的导航是开发自动化无人机系统的关键先决条件。现代无人机配备了许多传感器,使操作员能够准确确定其位置并提高导航的可靠性。鉴于上述情况,需要进一步研究,以促进无人机姿态估计可靠方法的开发,并将这些技术与无人机的外部传感器集成。这是一项极具挑战性的任务,正如为验证配备实时运动学(RTK)定位系统和惯性测量单元(IMU)设备的全球导航卫星系统(GNSS)接收器的准确性而进行的研究所证明的那样。商用无人机解决方案的姿态估计精度不断提高。随着技术进步、新部件的开发及其兼容性和集成性,需要进一步研究定位精度,包括使用依靠地面设备确定测量点坐标的传统方法。
所承担的研究问题对全自动无人机具有重大影响,这些无人机在没有操作员参与的情况下根据编程程序飞行。不确定性下的无人机飞行规划问题也是人工智能和机器人界以及动态系统和控制界的一个有趣的研究问题。与确保飞行稳定性和安全性相关的问题被La Valle和Sharma归类为:
① 车辆动力学的不确定性和遵循命令的精度有限;
② 对环境的了解的不确定性,包括其中的障碍;
③ 操作环境中因素的不可预测性;
④ 仓位信息的不确定性。
自主无人机的主要优点是,有关飞行机动、传感器激活或使用附加设备的决策不是事先编程的,而是由机器根据现实生活情况独立做出的。本研究旨在评估无人机导航系统的准确性,研究结果可为自主飞行器的发展做出重大贡献。
本研究旨在比较和评估无人机机载导航系统生成的数据和两个独立转速计测量期间获取的数据,以评估无人机姿态估计的准确性。测量是在三种情况下进行的。为了研究的需要,计划在选定的地区执行飞行任务;设计、稳定和测量了大地测量控制点的参考框架;航点稳定,并安装了转速表站(图1)。无人机地理坐标的转速测量是使用连接到DJI M360 RTK无人机的300°棱镜反射器进行的。在实验中,作者还考虑了大气条件对获得的测量结果的影响。因此,飞行是在从北方吹来的风中进行的,平均速度为6公里/小时。

图1 研究区
DJI MATRICE 300 RTK是最受欢迎的商用无人机平台之一。根据制造商的规格,该平台的净重为8.37千克,尺寸为810 × 670 × 430毫米(长×宽×高)。该无人机配备了与GPS Navstar,Glonass,BeiDOU和Galileo系统兼容的GNSS RTK接收器。两个GNSS RTK天线位于手臂上,无人机的位置是使用虚拟参考站确定的。DJI MATRICE 300 RTK在D-RTK模式下的垂直和水平悬停精度(无风或微风)分别为±0.1 m。为了满足研究的需要,无人机进行了扩展,包括一个用于安装徕卡GRZ122 360°棱镜反射器的平台(图2)。

图2 DJI MATRICE 300 RTK搭配徕卡GRZ122 360°棱镜反射器
使用静态GNSS方法在两次测量会话中确定参考系中的大地坐标,每次使用45个TOPCON Hiper SR GNSS接收器进行4分钟。使用自由站方法的转速表站的位置基于高精度的坐标测量。无人机的位置通过使用徕卡Viva TS30和徕卡Viva TS15机器人转速表进行了验证(图3)。
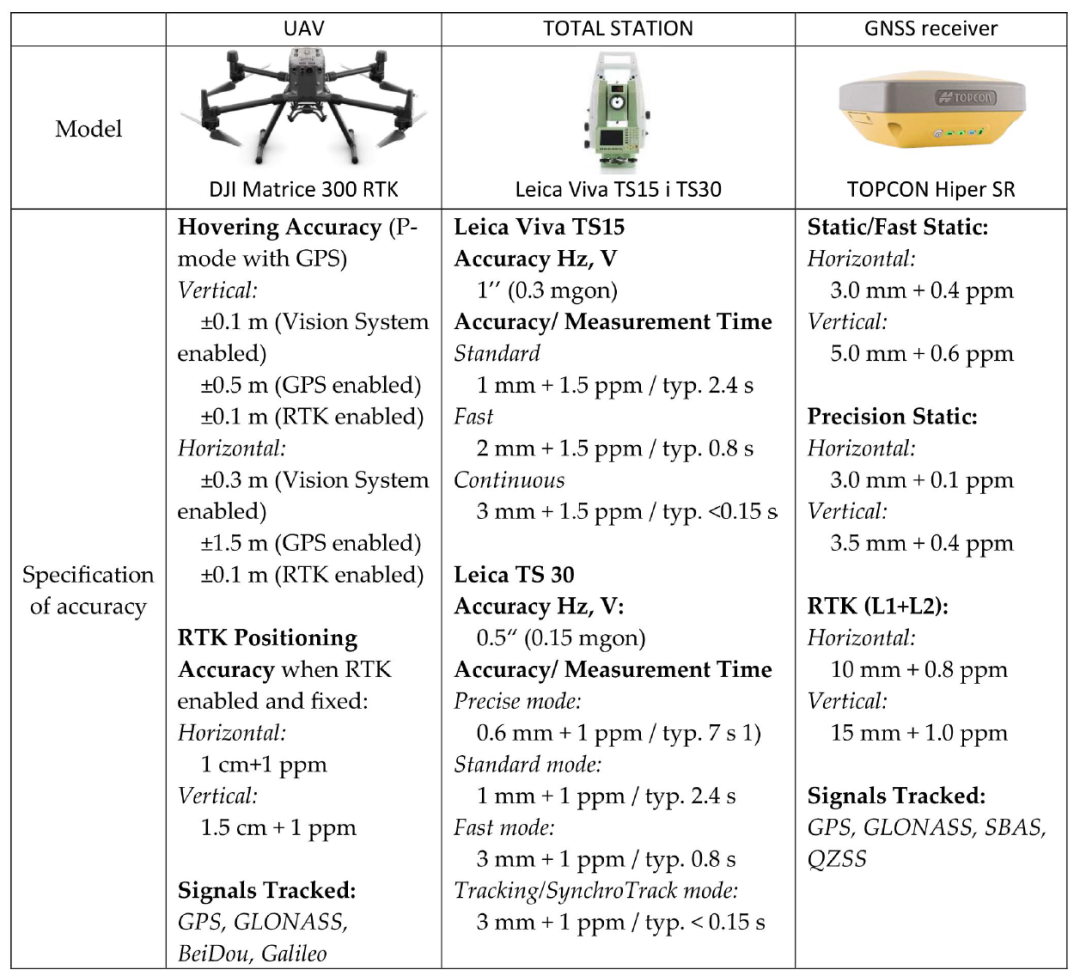
图3 评估二手设备的准确性
转速表是同步的,以便于比较测量数据。在棱镜跟踪模式下进行转速测量以提高采样频率。根据图3,基于角度测量和跟踪模式下的距离测量结果进行比较。转速表的位置及其坐标如图4所示。
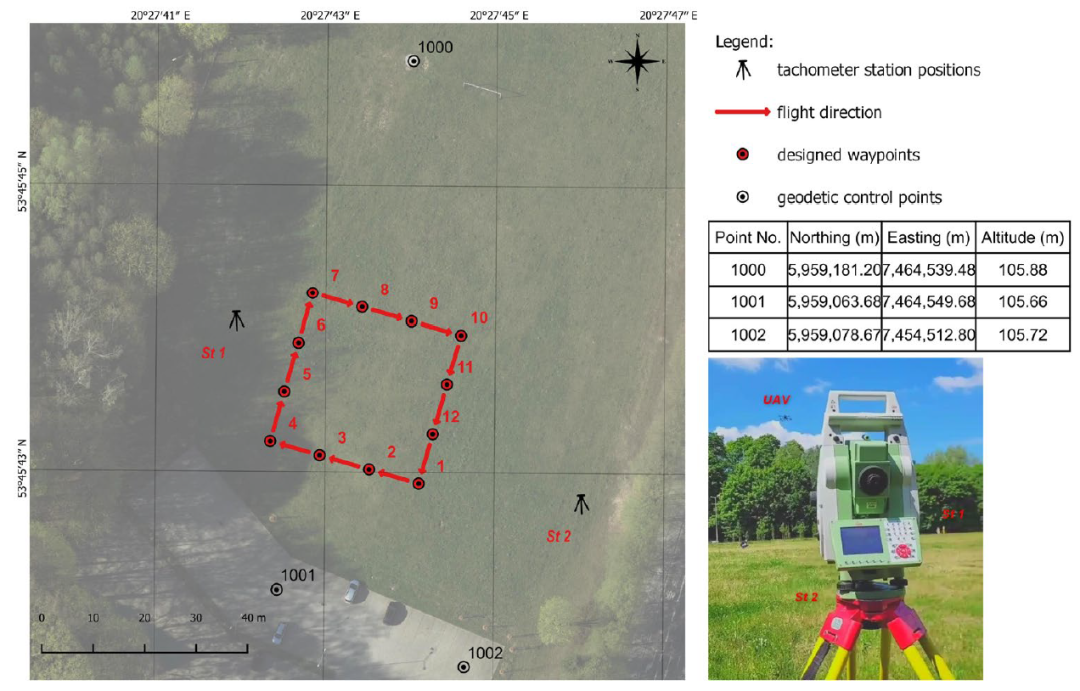
图4 规划中的无人机任务
在第一种情况下,当无人机悬停在具有已知坐标的点上方时,确定了绝对姿态估计的稳定性。无人机坐标在1秒的时间间隔内用机器人转速计确定。测量在每个高度快速连续进行,以确保一致的天气条件并尽量减少外部因素的影响。在第二个实验中,在沿预定义轨迹飞行的过程中分析了无人机的位置。飞行任务是在10m的高度沿着任务点坐标定义的路径进行的。这次访问计划是为了确保符合进行低空摄影测量的要求。无人机在一个方形区域上方飞行,它在主要航点上方盘旋并改变方向。第三个实验是第二个实验的修改版本,用于分析无人机在不间断飞行期间的位置,而无需悬停在航点上。图5显示了所进行的实验的范围和不同阶段。
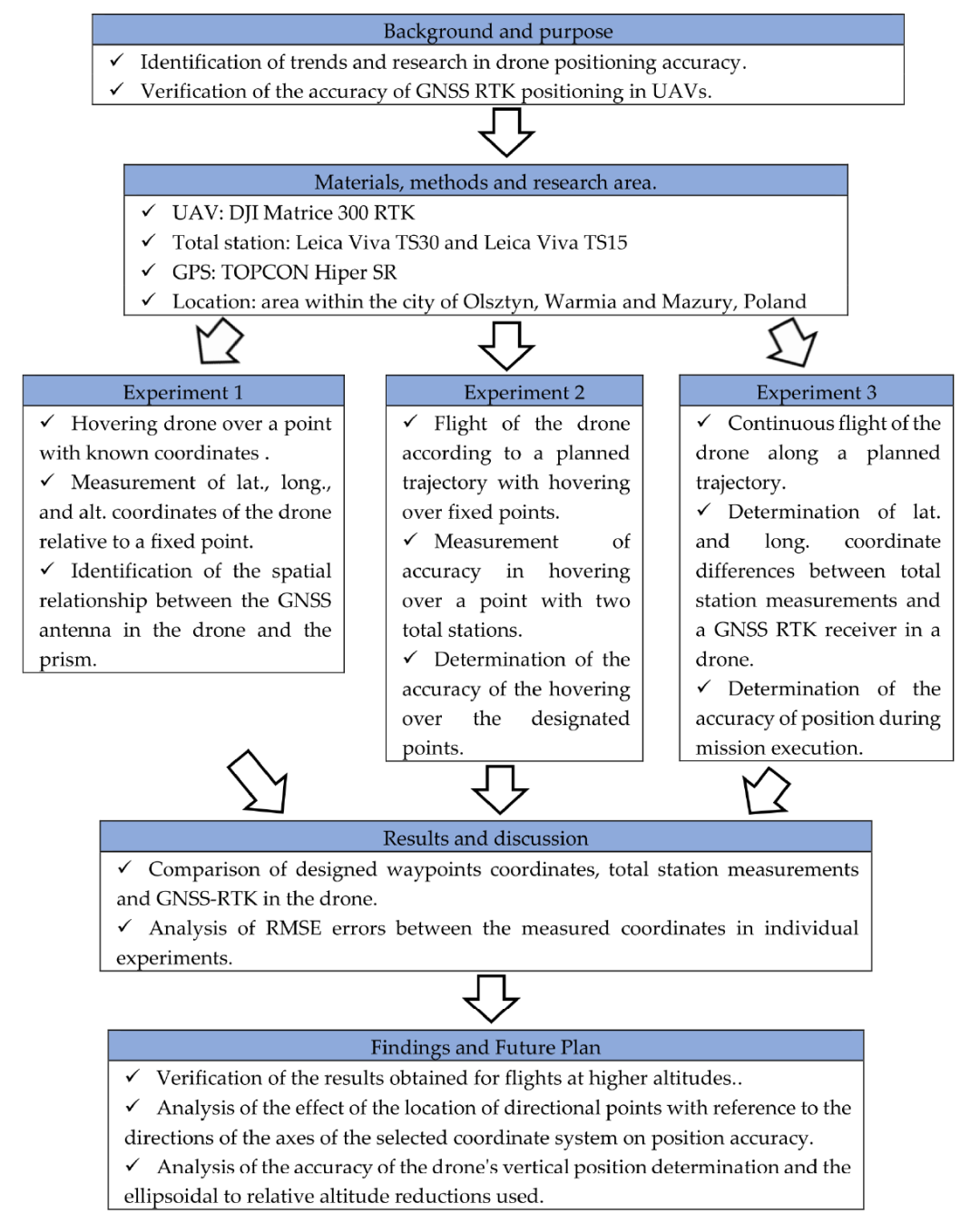
图5 研究流程概述
实验生成了一组独立的坐标测量值。第一个数据集包含有关无人机坐标的信息,这些信息基于DJI解决方案专用Web应用程序记录的数据。AIRDATA应用程序记录飞行参数、天气状况、电池电量,并显示有关可能影响飞行性能的设备和环境因素的警报(图6)。
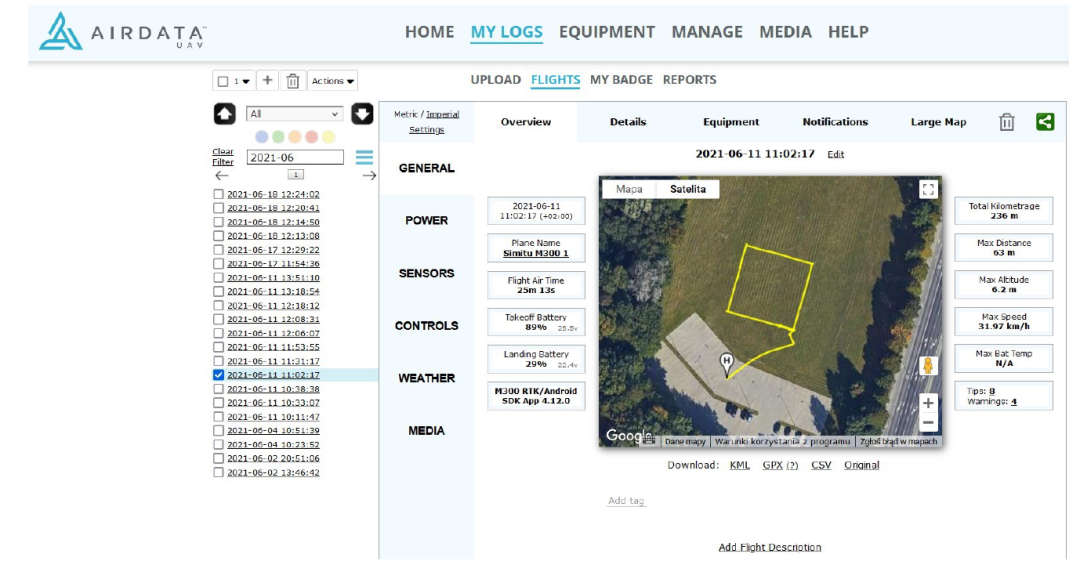
图6 AIRDATA应用程序
第二个和第三个实验的目的是生成额外的数据,以验证无人机在计划任务期间姿态估计的准确性。在这些实验中,无人机的坐标在三个高度测量,采样频率为每10秒测量五次(图7)。与第一个实验类似,无人机注册的数据是通过AIRDATA应用程序获取的。
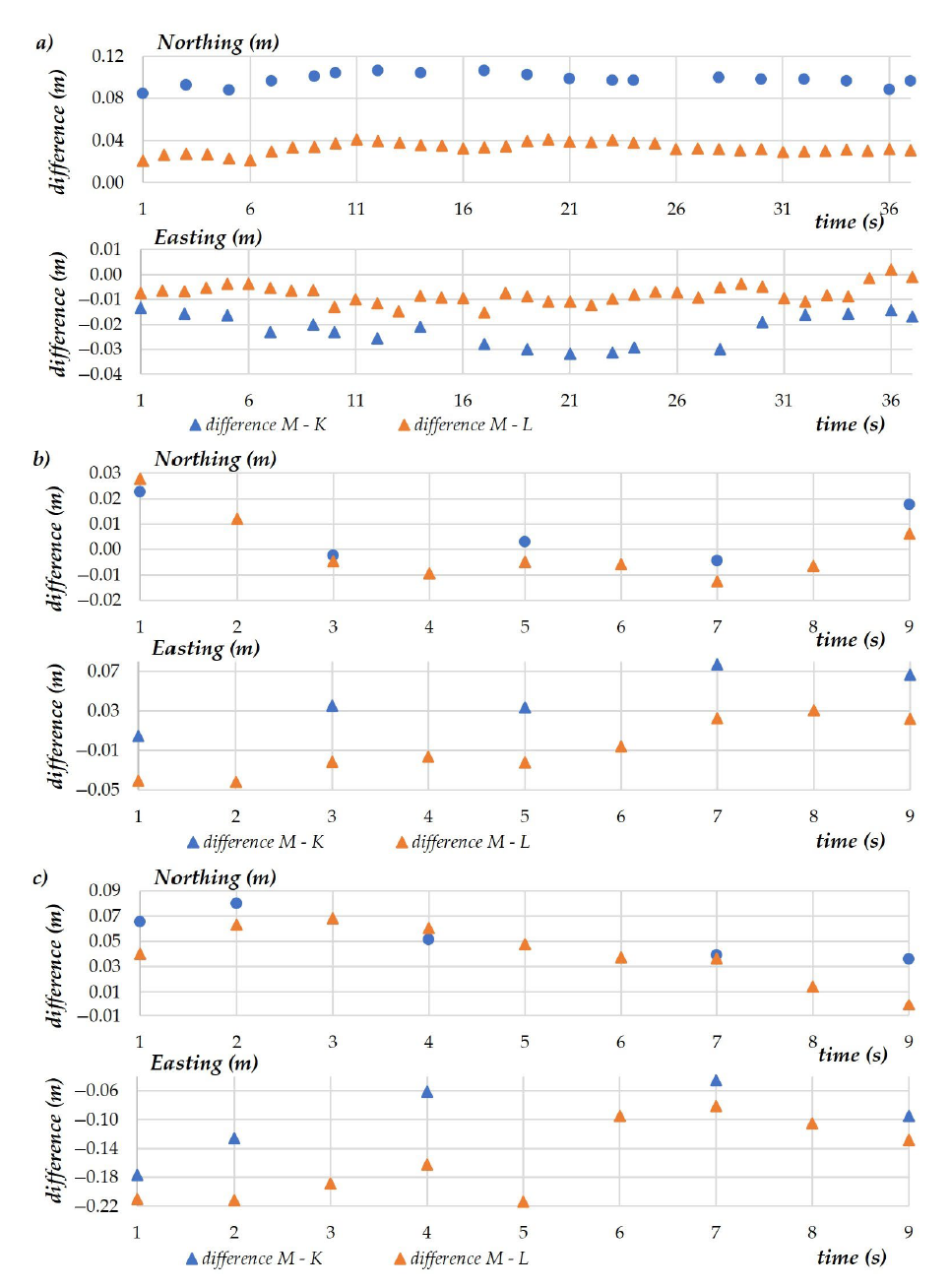
图7 比较在每个检查高度(a)高度H=1.5m处测量的坐标(b)海拔高度H=5m(c)海拔高度H =10m
图8显示了无人机姿态状态的空间分布。圆圈表示半径为0.05 m、0.10m和0.20m的缓冲区,并表示与任务计划中设置的航点的距离。用转速表测量的无人机位置用绿色(K)标记,从无人机获得的坐标用红色(L)标记。分析显示,在10 m的高度,无人机的坐标相对于理论坐标移动了0.10 m至0.20 m。在其余高度(0.10 m和1 m)处,这种差异不超过5.5 m。
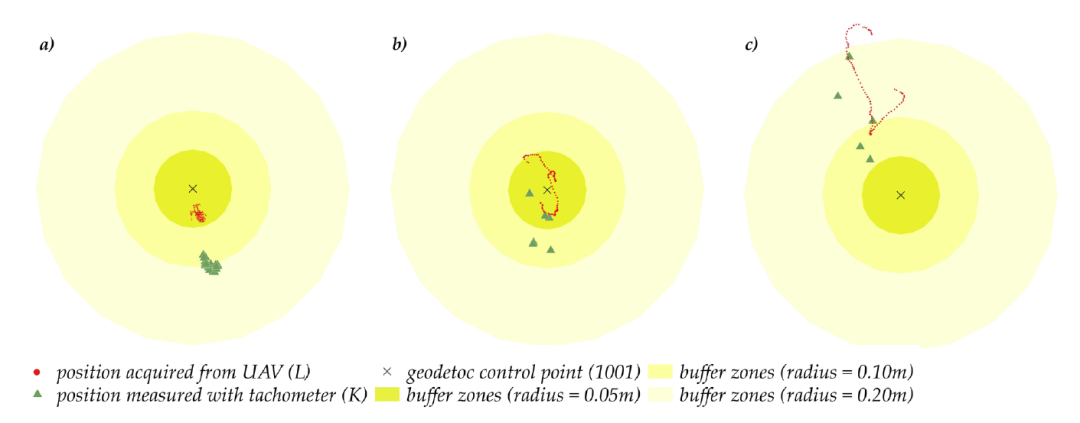
图8 比较在每个检查高度(a)高度H =1.5m处测量的坐标(b)海拔高度H = 5m(c)海拔高度H=10m
研究表明,配备GNSS RTK接收机的DJI MATRICE 300 RTK无人机的定位精度与制造商的规格一致。GNSS RTK接收器正确映射了X坐标,并且无人机测量的值与模型数据之间的差异随着飞行高度的升高而增加。进行的实验表明,大多数偏差主要归因于外部因素,包括天气条件。这些因素的影响可以最小化,但在实地调查中不能完全消除。无人机的姿态估计精度无法在实验室中可靠地确定,应进行现场测试以验证系统在现实条件下的能力。飞行的方向和高度都会显著影响姿态估计精度。
源自:Sensors 2023, 23, 2092. https://doi.org/10.3390/s23042092















