无人机网5月19日报道,据《UST》消息,Fixposition是具有高精度定位的自主制导传感器的领先开发商,与无人系统技术公司合作,展示他们在该领域的专业知识。金牌 "简介强调了该公司的技术是如何将高精度RTK-GNSS与深度融合的惯性和视觉传感器相结合,随时随地为自主车辆提供精确的全球定位。
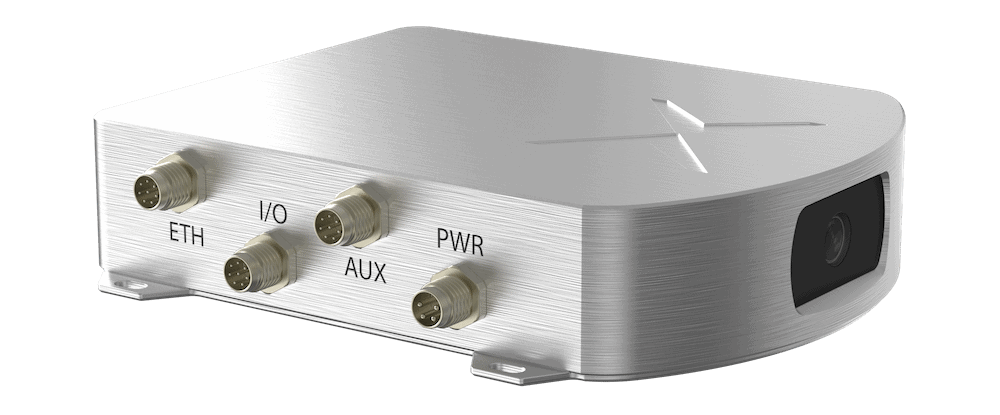
Vision-RTK 2是一个轻便、紧凑的现成系统,可以很容易地集成到各种自主车辆和平台上。它具有行业标准的连接器,为物流、景观设计、城市配送、割地机等提供即插即用的自主性,使您能够简化开发,缩短上市时间。该解决方案有防风雨外壳或OEM板,包括一个直观的基于网络的设置和监测界面,有一个提供数据可视化的仪表盘。
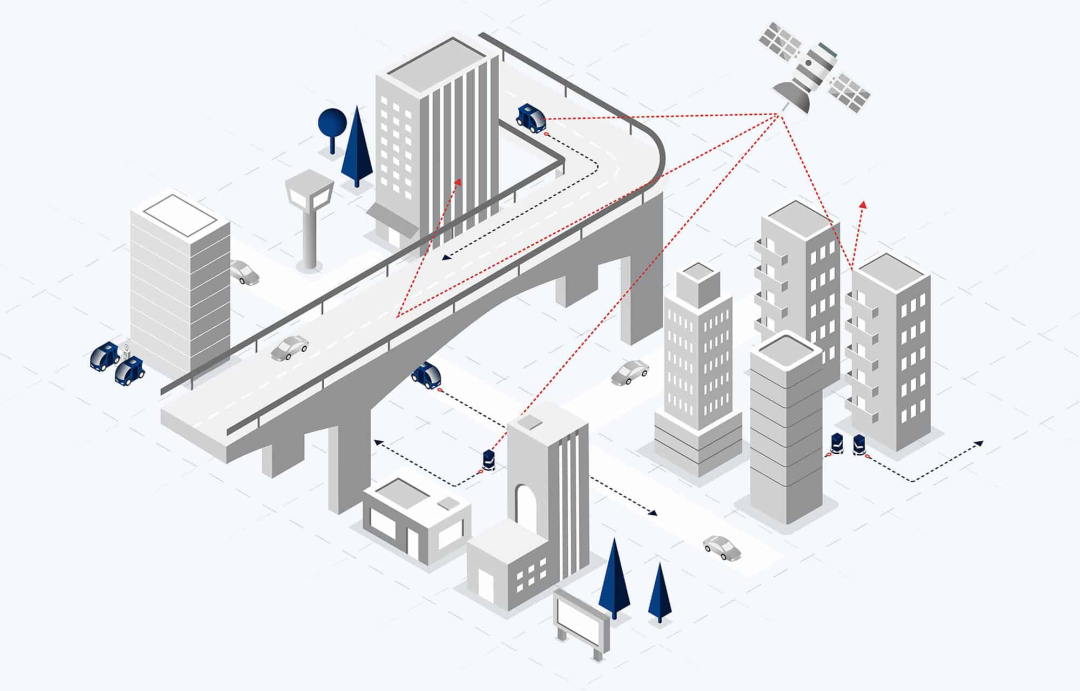
Vision-RTK 2系统将所有可用的传感器数据送入Fixposition的深度传感器融合引擎,结合GNSS和相对定位的优点,以克服单个传感器的弱点,并消除基于IMU的解决方案中存在的随时间变化的漂移特性。其结果是,即使在GNSS退化或被拒绝的地区,也能实现强大而精确的定位。

两个双频接收器使用所有四个GNSS系统(GPS、GLONASS、BeiDou和Galileo)的卫星信号来确定传感器的绝对位置和方向。RTK技术被用来纠正误差,实现厘米级的精确定位。NTRIP被用来向传感器提供校正数据。该数据可以从公开的虚拟参考站(VRS)网络或本地物理基站中获得。

摄像机图像被用来提取重要的点(视觉特征),这些点在多个图像中被追踪。通过对视觉特征的后续观察,可以计算出摄像机在所拍摄图像之间的移动情况。
Vision-RTK 2是广泛的机器人应用的理想选择,包括送货、精准农业和景观设计。Fixposition可以与您合作,确定您的硬件和软件平台的具体情况以及您的应用的独特要求,微调您的设计以优化性能,并在生产阶段继续支持您。















