全文1942字,预计阅读时间5分钟
原创 | 季梦玉
编辑 | 吕嘉玲
笔者之前简单地认为,空中作业机器人不就是无人机+机械臂吗?这两项技术如此成熟,结合起来应该也难不到哪里去。后来深入调研,发现空中作业机器人没那么简单。不管什么东西,从1个变成3个都会有翻天覆地的变化,它们的复杂程度不在一个量级上。空中作业机器人亦是如此。在上一篇我们的文章中(文章链接),主要介绍了空中作业机器人的分类。本篇文章主要介绍它在实际生活中的用途,以及涉及到的技术难题和解决方法。

空中作业机器人可以帮助人类在实际生活中做什么事呢?人类的好帮手如图1,比利时初创企业 ART Robotics 开发的机器人HELIOS 系统,由六轴无人机+清扫机器人组成,专门用于清理屋顶的太阳能电池板[1]。

图1. 机器人清扫太阳能电池板[1]
如图2所示,由韩国首尔大学研发的这款机器人可以自由伸缩,用于捡海面上或深沟里的垃圾[2]:

图2. 可伸缩机器人[2]
宾夕法尼亚大学设计的4轴无人机+2自由度机械臂可以实现末端的位置和姿态轨迹跟踪[3],用于高空喷涂(图3)和空中摄像(下面的视频)等。其中,空中摄影要求末端相机始终指向目标物,同时末端的相机始终处于水平平面上,不能有倾斜。这就要求系统必须规划出一条在构型空间动力学可行的路线,使末端具有6D轨迹跟踪的能力。但是这个仅仅是仿真,还没有做出实物实验。
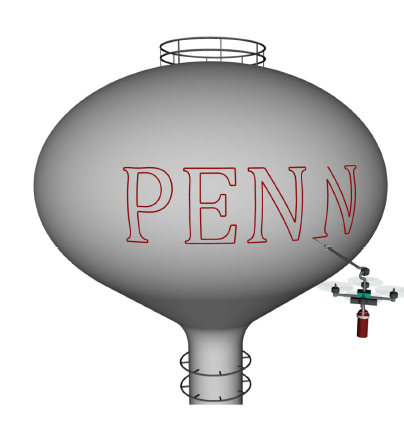
图3.高空喷涂[3]
视频1. 空中摄像[3]
另外,还有NASA-Jet实验室设计的机器人由六轴无人机+3自由度机械臂组成,可以像运动员一样身影矫健得做单杠运动[4]。这个也是仿真,还没有做出实物实验。
视频2.空中作业机器人做单杠运动[4]
总结一下,以上几个实验或仿真涉及到的技术有:末端的柔顺控制,末端位姿轨迹跟踪和高动态运动控制等。
这里先介绍我正在研究的第二个问题:末端位姿轨迹跟踪。其余两个问题以后再介绍。末端位姿轨迹跟踪针对我们的4轴无人机+n自由度的机械臂系统,目前解决末端位姿轨迹跟踪这个问题有两种方法:基于动力学解耦的控制方法和微分平坦法。
01 - 动力学解耦
4轴无人机是个欠驱动系统,因此我们的空中作业机器人也是欠驱动系统。无人机有4个控制量,这意味着它的位置和姿态不能单独控制,是耦合在一起的。对于末端 6D轨迹跟踪的任务,给定末端任意轨迹,在系统构型空间内不一定有解。那么我们该如何解决这个问题呢?文章[3]和[5]提出了一种动力学解耦的方法,即将整个系统看作是多组合的刚体,然后分别写出系统瞬时重心的平移方程和剩余部分的旋转方程。如图4,动力学解耦将系统分成两个部分:平移部分和旋转部分,相当于将系统的欠驱动部分提取出来,剩下的旋转部分为全驱动系统。
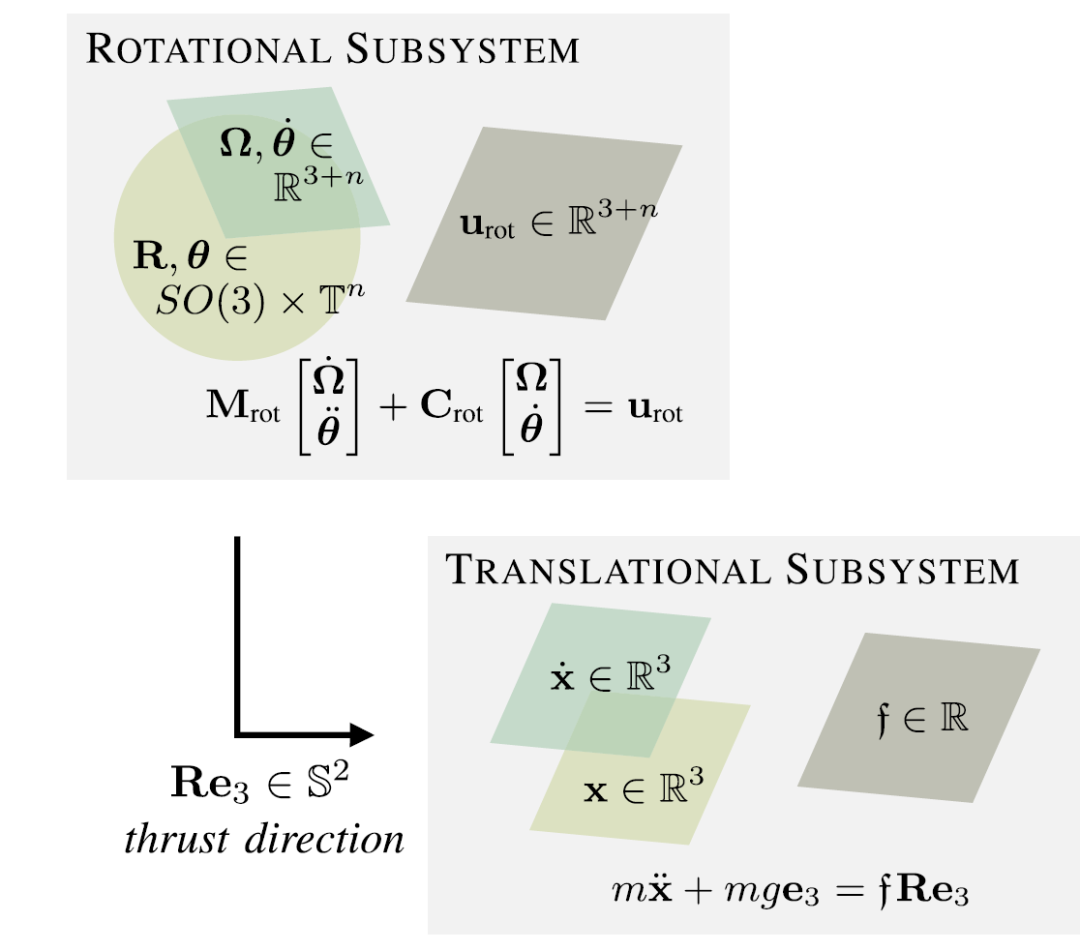
图4. 动力学的平移部分和旋转部分[3]
文章[6]的动力学解耦法将系统分成3个部分:瞬时重心的平移部分,无人机的旋转运动,剩余机械臂的运动。平移部分和无人机旋转部分便可以应用无人机成熟的控制律,剩下的全驱动部分就比较容易设计控制律了。这个方法的优点是可以充分利用无人机成熟的控制算法,缺点是每个控制环计算量比较多,对机上算力要求高,实时性可能不太好。
02 - 微分平坦法
另外还有一种方法为微分平坦法。具有这个性质的系统可以自动生成一条动力学可行的光滑轨迹。只要确定了末端轨迹以及它们的导数,则系统的状态量以及它们的有限阶导数都可以通过公式推导出显性的解析表达式!举个例子,大家就理解了。如下图所示,这个是由4轴无人机+2自由度机械臂组成,跟文章[7]一样执行空中摄像任务。那么我们要求,末端相机按照图中蓝色的轨迹走,同时末端z轴指向球心,y轴一直在水平面内。那么知道了末端这么走,我们却不知道无人机该怎么飞,机械臂的每个关节角该怎么走。因此,微分平坦的工作就是知道了末端的轨迹以及它们的导数,经过一系列公式推导,获得无人机位置,姿态,和每个关节角度和它们的速度以及加速度关于末端轨迹的函数。
视频3. 笔者复现的文章[7]末端位姿跟踪动图
但是,文章[3]和[7]中对空中作业机器人都提出了几何限制,只有特定构型的空中作业机器人才能利用这个性质。文章[7]指出,只有系统的质心在末端坐标系中的坐标是固定不变的,系统相对于末端的平坦输出才是微分平坦的。文章[3]在文章[7]的基础上,提出了新的平坦输出,同时证明4轴无人机+n自由度机械臂的系统是微分平坦的。但是系统的内运动学可能是不稳定的,只有对于特定构型的机器人才是稳定的。对于这类内运动学不稳定的机器人,同样不能用微分平坦这个性质。这个方法的优点是:不需要轨迹规划这一部分,直接通过计算得到任意轨迹对应的控制输入,使末端轨迹更加稳定和顺滑;允许空中作业机器人的大机动飞行。缺点是:这个方法的理论推导比较复杂;能够用这个性质的机器人需要满足特定构型。关于末端的柔顺控制和高动态运动控制这两个问题,都非常有意思,这里先占个坑,以后我们再来探讨。请读者们耐心等待哦!

参考资料
[1] https://mp.weixin.qq.com/s/inrhYCF3dDvuFjLjo6TuGw
[2] Evandro Bernardes,Stéphane Viollet,Design of an Origami Bendy Straw for Robotic Multistable Structures, Journal of Mechanical Design, 144, 3, (2021).https://doi.org/10.1115/1.4052222
[3] J. Welde, J. Paulos and V. Kumar, "Dynamically Feasible Task Space Planning for Underactuated Aerial Manipulators," in IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 3232-3239, April 2021, doi: 10.1109/LRA.2021.3051572.
[4] https://doi.org/10.48550/arXiv.2107.03722
[5] Yang, H. , & Lee, D. . (2014). Dynamics and control of quadrotor with robotic manipulator. IEEE International Conference on Robotics & Automation. IEEE.
[6] G. Garofalo, F. Beck, and C. Ott, “Task-Space tracking control for underactuated aerial manipulators,” in Proc. Eur. Control Conf., 2018,pp. 628–634.
[7] J. Welde and V. Kumar, "Coordinate-Free Dynamics and Differential Flatness of a Class of 6DOF Aerial Manipulators," 2020 IEEE International Conference on Robotics and Automation (ICRA), 2020, pp. 4307-4313, doi: 10.1109/ICRA40945.2020.9196705.
本文由西湖大学智能无人系统实验室博士生季梦玉原创,申请文章授权请联系后台相关运营人员。
欢迎来到西湖大学智能无人系统实验室!我们的实验室专注于小型无人机(UAV)的基本理论和新应用。技术研究领域包括(i)单无人机的制导,导航和控制,(ii)多无人机的集群系统,以及(iii)基于视觉和其他类型的传感器的智能传感系统。目前,我们有十多个小组成员,包括博士后,博士生,研究助理和访问学生。他们都毕业于中国和海外的顶尖大学。我们拥有一流的实验设备,如Vicon,动作捕捉系统和各种实验无人机平台。
欢迎来到西湖大学智能无人系统实验室! 小型旋翼无人机在民用和军事领域有广泛的应用,涉及到众多的科学研究问题。 西湖大学“智能无人系统实验室” 关注于微小型无人机的基础理论与应用研究,面向国家和社会重大需求,专注于从事高影响力的研究工作。 实验室目前关注的研究领域包括单无人机系统的导航制导与控制、多无人机系统的协同控制与估计、以及基于视觉和多种传感器的智能感知系统。 实验室具有一流的科研设施、完善的工作条件、活跃的科研氛围。 目前实验室已有十几名优秀团队成员,分别来自国内外著名高校。 此外,实验室具有高精度VICON室内定位系统、一系列空中和地面机器人平台、GPU计算服务器、3D打印机等设施,为开展相关研究和实验奠定了良好基础。
















