近年来,伴随着实景三维中国、新型基础测绘等国家重大项目的全面推进,倾斜航空摄影实景建模在不断被市场认可和接纳的同时,对模型的精细程度的要求也越来越高。市场上大型的倾斜航摄系统受制于重量、曝光间隔等因素,只能搭载在固定翼或是大型的直升机平台上,获取影像分辨率受到飞机速度的严重影响;而使用消费级相机改装的小型倾斜航摄系统像幅小、效率低、成像质量受限的问题又比较突出。为了应对市场超高分辨率倾斜影像需求的大幅提升,瞰景科技发展(上海)有限公司与全球工业相机领军品牌Phase One强强联合,经过1年的自主研发与反复测试验证,打造出Monster这款集成了5台Phase One 1亿像素镜头,专门用于有人直升机、大面积、高分辨率倾斜影像获取的专业倾斜航摄系统,成功用于国内多个大型数据采集项目,并创造了有人机平台获取1.5cm超高分辨率影像的成功案例。
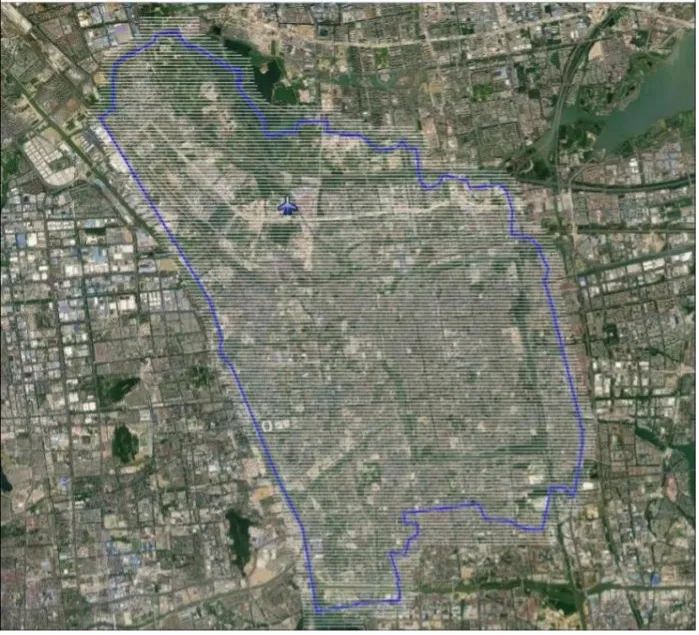
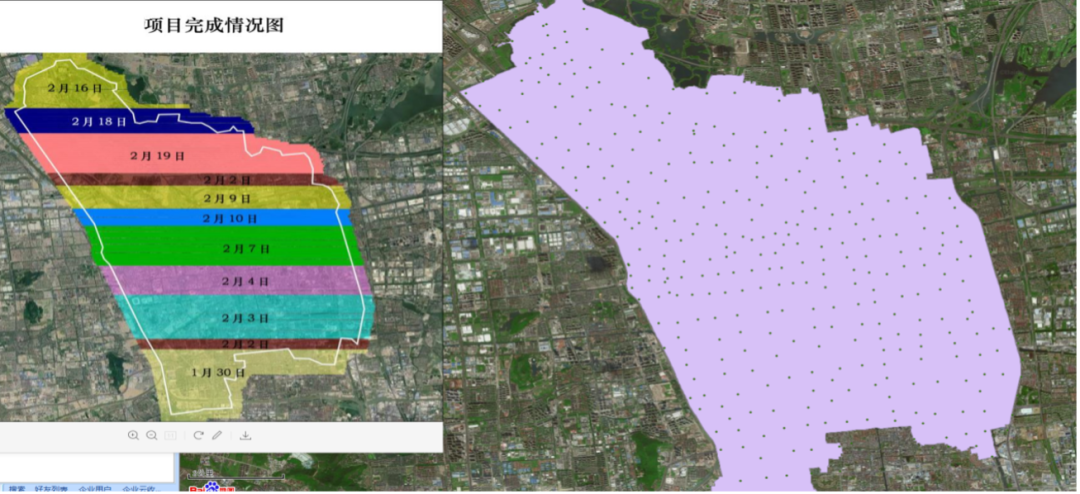
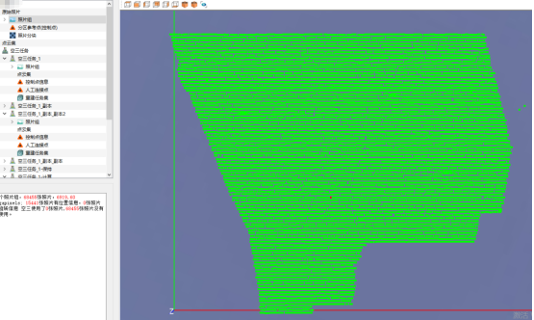
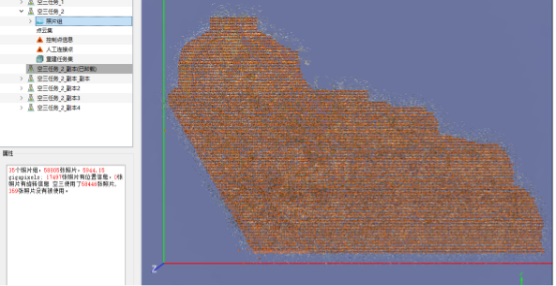
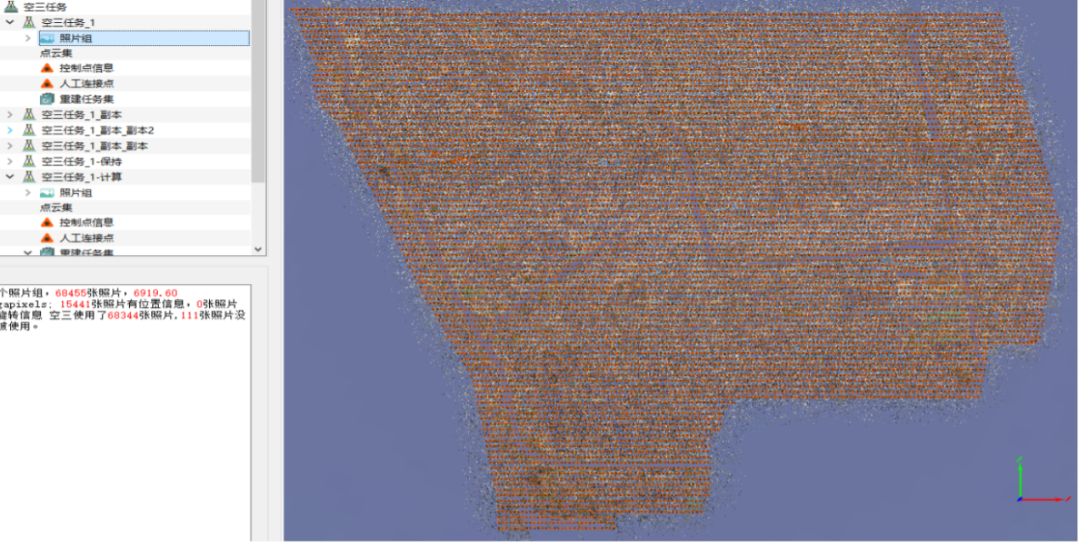
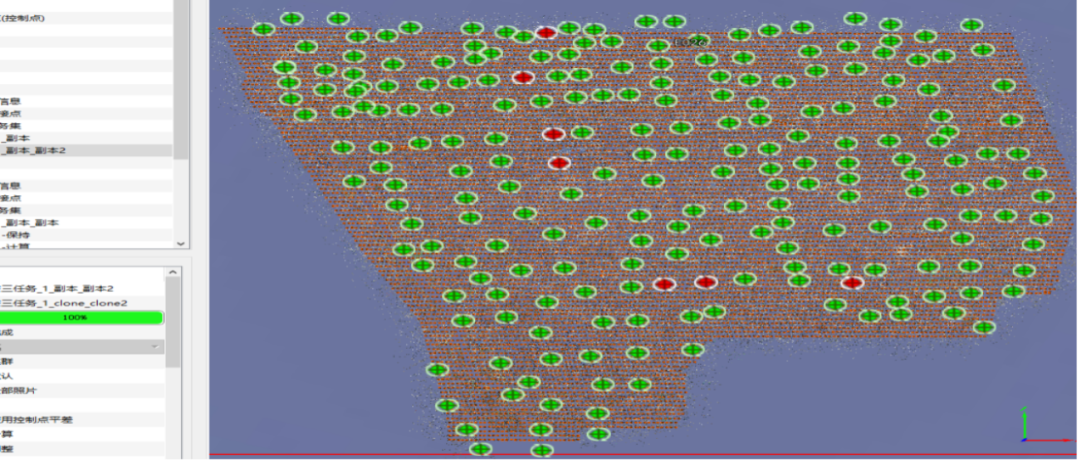
由Phase One工业相机集成的“小怪兽”航摄仪 Monster“小怪兽”由5台Phase One工业相机集成,相机采用背照式CMOS传感器,同时配合50万次超长寿命叶片式快门技术和高速图像存储控制器,保证了作业稳定性和高质量的遥感影像。此外,“小怪兽”还配置了高精度POS系统,全套吊舱的总重量仅为18公斤,可快捷地搭载R44、Bell 407等常用载人直升机平台,获取优于2cm分辨率的影像,为有大面积、高分辨率三维数据需求的用户,快速的提供高质量的影像数据。 图1 “小怪兽”全家福 “小怪兽”航摄仪相关参数见下表: “小怪兽”航摄仪有以下几个特点: 幅面大:由5台1亿、1.5亿像素的Phase One镜头集成; 精度高:工业级相机、高精度POS; 重量轻:镜头部分重量仅为18Kg; 操作易:安装简单、友好的中文飞控; 做工精:航空型设计、IP65级防水防尘。 经典案例 项目概况 近年来,拥有高效数据获取能力和精良影像质量的“小怪兽”,结合Smart3D2019实景三维建模系统,实现了软硬件一体化的服务于城市级、高分辨率实景三维模型构建的整体解决方案,取得了诸多经典的案例。 测区概况 测区地处长江三角地区,面积约100 km²,地势低平,由西向东南微微倾斜,微向东倾,地面标高海拔 2-4米。测区属于亚热带季风海洋性气候,四季分明,气候温和,雨量充沛。根据甲方要求,对测区获取优于3厘米的倾斜影像,航向重叠度80%,旁向重叠度75%,规划飞行航线如下图。 图2 航线敷设图 影像获取平台 瞰景Monster“小怪兽”倾斜航摄仪,搭载罗宾逊R44直升机。 图3 飞行平台及相机安装示意图 影像获取 飞行作业23小时58分钟11架次,获取影像127260张。 模型成果格式 OSGB、OBJ。 建模硬件配置 CPU i5-9600,显卡GTX 1660,内存64G,20台; 建模软件 瞰景Smart3D 2019实景三维建模系统。 数据处理 瞰景Smart3D实景三维建模软件。 主要处理流程 内业处理流程如下图所示 图4 瞰景Smart3D三维建模处理流程 具体处理操作 数据导入,根据外业人员提供的飞行航线图,分为两个工程导入照片,数据量各为58805、68455张。 图5 测区采集设计图 图6 数据分布图 图7 数据分布图 因为在瞰景Smart3D2019性能模式下,64G内存的电脑可以跑7万张像幅为1亿像幅的数据量,所以处理该数据直接使用2个工程导入两块数据提交空三,下图为空三结果和对应空三计算时间,两个工程空三节点分别用了8台、10台。 图8 区块1自由网空三结果 图9 区块1自由网空三报告 图10 区块2自由网空三结果 图11 区块2自由网空三报告 空三结束,进行刺点,然后提交平差。下图为平差后结果和对应控制点、空三精度。 图12 区块1控制点分布及空三报告 图13 区块2控制点分布及空三报告 平差过后,检查精度,满足要求后下一步提交模型。此数据总共用了20台计算机双开计算引擎(一机两开),按150米一块,模型数量总共4492个瓦块,建模共计7天完成。 图14 一机双开高效建模 模型成果展示 大面积城市级数据采集,使用有人机搭载Phase One大幅面相机,影像幅面大,照片数量少,影像纹理清晰,作业效率高,安全稳定。