其实一直想出一期讲无人机正射影像处理的,但由于一直没找到合适的时间去整理,所以耽误到现在才开始写。言归正传,直接进入教程。
1、 测区内的控制点布放
不同类型的区域放控制点的方法不同,这里简单介绍一下布放控制点的方法。这里我以自己熟悉的地形为例,小面积的农村地,建议控制点分布均匀,根据测区精度要求决定控制点密度,1:2000,基本上一个普通大小村子(0.1km2)就放四五个控制点,如图所示。

1、使用奥维地图记录防止控制点的位置
奥维地图是一款比较专业的地图软件,其中有个位置标记功能,建议大家使用,便于后期我们手动刺控制点的时候找到相应的照片位置。
2、 无人机数据采集
(1)无人机拍照时间
无人机数据采集的质量好坏直接决定了后期正射影像的质量。强烈建议要选择好无人机拍照的时间,中午12点至下午2点间尽量不要采集数据,光照直射,拍出的照片容易过曝。如果用这样的照片制作正射影像,也会偏白。

2、中午时间拍摄的过曝照片
(2)无人机拍摄方法
如果是使用的消费机无人机,建议把拍摄的测区分成若干块进行拍摄,这样可以避免无人机图传距离不够易失联,无人机电池不够的尴尬问题,如下图所示分割测区。
如果是DJI的消费机无人机就推荐使用Altizure,设置飞行一个垂直向下90°的航线即可。

3、飞行前人工把测区分成若干小区域

4、altizure
3、 无人机数据处理
(1)无人机数据读取
无人机数据处理是正射影像制作最为关键的地方。首先用读卡器把无人机中的照片导入到电脑中,如果发现无人机曝光程度及色彩有较为明显的不一致,应删除明显曝光错误或者有问题的照片。可以删除一些质量有问题的照片(前提是拍摄的照片重叠度足够),但是一定不能使用第三方软件(例如photoshop)预处理照片,预处理后会使得照片损失原有的信息,例如GPS信息。
(2)context capture 或者pix4d软件数据处理
我们这次教程以cc(原Smart3D)为例来讲解数据处理过程,如果大家想要pix4d的教程,可以关注留言私信你的邮箱,我会把pix4d的教程发给大家。
导入无人机照片进入软件中,操作方法如下图所示
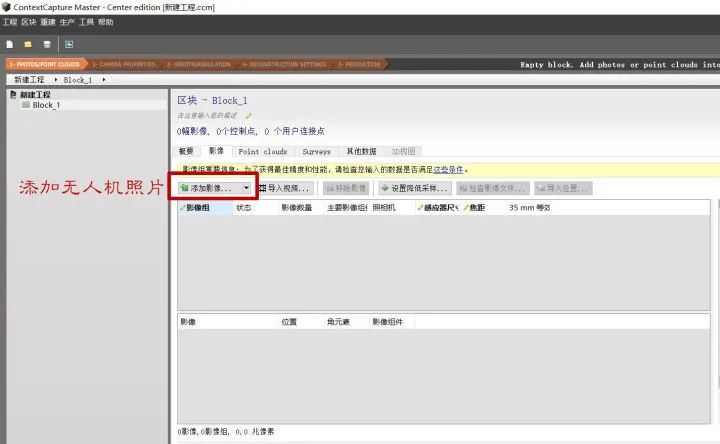
5、无人机照片导入软件中
添加后如图所示,我使用的是精灵4,感应原件尺寸为13.2,焦距8.8,基本上主流的镜头参数都能查的到相应参数。
导入控制点数据

6、控制点导入界面
在导入控制点之前,大家要先编辑好控制点的.txt文件,范例如下。需要敲黑板的是先导入控制点前,需要设置控制点的坐标系统,若是WGS84则要提前选择,若是CGCS2000也是一样道理。
















