


地面站推荐语:经过了上海站、南京站、苏州站、北京站、沈阳站、深圳站、西安站等七站之后,思动学院得到了众多知名公司的支持,并且课程已逐渐走向成熟。欢迎来自科研院所、无人机公司、科技院校的想提升自己的开发者们前来报名。
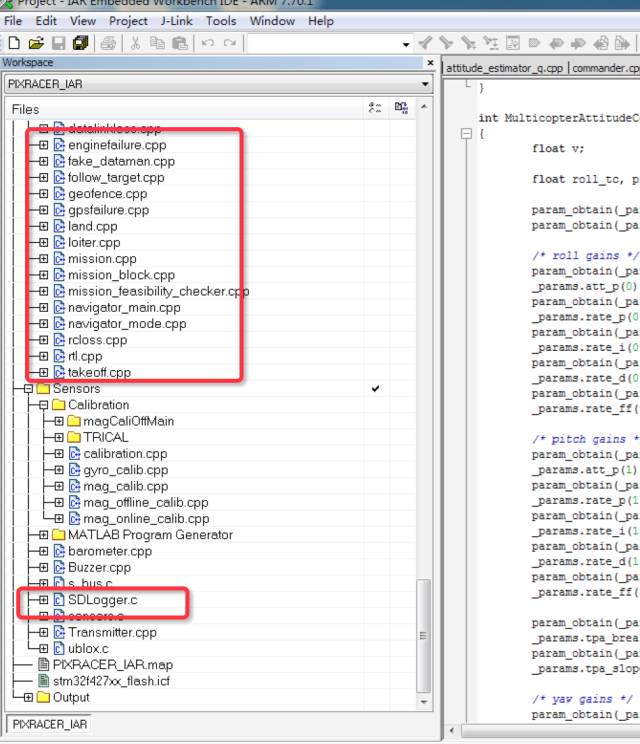
这次我们取得了重大突破,PX4整套系统(OS替换为FreeRTOS)已经移植到IAR环境下,在线调试、开发等将不再是困难。详见第三节。
1、讲师介绍
Summer
思动学院主讲师,Dronecode认证咨询顾问。
具有丰富的PX4代码解读经验,公开分享一系列代码解读技术文档,本公众号后续也会把他的一些技术文章同步过来。曾在北京、沈阳、南京以及苏州、深圳等地成功开班授课。
潇齐
飞控及地面站二次开发专家,有丰富的实战经验。
阿木技术社区发起人,具有丰富的开源飞控开发经验,完成多个基于PX4系统的实战项目和地面站二次开发。为课程带来了宝贵的实战资讯。
Better
阿木技术社区核心成员,主要研究Pixhawk系统框架,姿态和位置解算与控制的实现过程,熟悉OSD二次开发,具有丰富的无人机实际开发经验。
2、开课时间与地点
2017年4月22日~23日(周六周日)
地点:北京
具体地点将在稍后发布
本次在武汉开设的无人机开发培训班是思动学院与阿木社区联合举办。
Summer老师大家已经相当熟悉了,作为Dronecode的认证咨询顾问,思动智能科技的联合创始人,Summer钻研PX4系统已颇有心得,为大家贡献了诸多的宝贵见解,推动着中国开源社区的不断发展。
还有我们的伙伴社区,阿木技术社区(amovauto.com),阿木社区由@潇齐发起,同时聚集了@Better等多位优秀的独立开发者,他们有着成熟的开源飞控开发经验,完成了多个实战项目。
3、不可错过的亮点
这次的课程比以往新增了offboard模式实践讲解和软件仿真调试飞控算法的内容。本次培训不仅让您能快速了解开源PX4系统,还能让您学习如何优化算法并替换私有算法以及仿真。上一期课程中主讲导航的PPT已经发布,并且移植(IAR环境)并优化过的EKF2也即将发布,敬请期待。培训时实地的演示移植好的PX4系统。
PS: PX4整体系统(对,没看错,就是整套系统,OS替换为FreeRTOS)已经移植到IAR环境下,在线调试、开发等将不再是困难,听到这个消息是不是非常的激动啊!!!
该部分需要收取一定的授权使用费。


4、课程安排
Part.1 第一部分
1.以开源飞行控制系统PX4为主,大致介绍飞行控制系统所需要的知识储备(如果需要可以详细讲述)
2. 组装、调参等。
Part.2 第二部分
以PX4开源系统为主,分析整个飞行控制系统。 1 二次开发平台的搭建,开源系统的整体代码框架,以及详解每一部分是做什么的。 2 介绍整个代码框架的启动过程。 3 rcS以及各种shell脚本的介绍,cmake的用途。 4 进程间通信uORB和操作系统nuttx。 关于进程间通信机制:本身这套开源PX4系统就是跑在OS上的,有了OS就需要了解IPC问题,而PX4里面的IPC就是基于uORB这个中间层的,了解了uORB对后续的开发就会简单很多很多很多~~ 5Sensors驱动以及后续替换sensor如何添加特定sensor的驱动程序(该部分需要考虑方向一致性问题)以及如何添加私有参数到地面站QGC实现类似PID调参的功能。(详细讲述标准通信接口serial、spi、iic,尤其是serial,现在很多激光雷达或者单双目模块都是通过serial和pixhawk通信的呢。summer主讲,配80页的分析文档)
6 控制系统四大中枢:姿态解算、姿态控制、位置解算、位置控制。 6.1姿态解算算法的介绍:互补滤波(CF)、梯度下降法(GD)、扩展卡尔曼(EKF)。关于姿态解算部分,详细结合互补滤波理论和代码讲解实现过程。 6.2姿态控制算法的介绍:串级PID控制,控制分为内环角速度控制和外环角度控制,详细结合控制理论和代码讲解实现过程。 因为summer本身就是主要研究姿态相关的,所以对姿态这块相当熟悉,不仅介绍相关的理论问题,还会结合PX4的实际的源代码讲解姿态相关的问题,理论结合实际,这是最好不过的了。 6.3位置解算(PosINAV 和LocalPositionEstimator: Zarathustra主讲) 6.4位置控制 7 飞行模式:command以及mavlink。
本次培训请来了Zarathustra主讲导航算法的逻辑原理以及在PX4中的实现。重点是令人头疼的的EKF2,吴老师不仅深入讲解其原理,还结合源代码做了优化。
绝对是不可错过的干货!
8 简单的开发修改源代码,如何实现简单避障功能。
9新增 (潇齐主讲)
1)offboard模式讲解,对于offboard模式是做飞控的高级开发必备的模块(比如实现视觉引导,SLAM自动避障等等)。
2)如何利用3D软件进行软件仿真调试(这个用来做飞控逻辑功能调试十分有用,测试功能性逻辑,减少坠机的风险)。
Part.3 第三部分
1、以上涉及全部的源代码实现和相关文档都会共享给参加的学员,有了这个再也不担心学不会PX4了。
2、相关参考论文资料和源代码分析文档以及《中国民用无人机市场分析及前景预测(2016版)》报告。
3、新增很多资料,不一一介绍了,比如通信接口和驱动。
5、课程费用
作为中国无人机飞控开发界对外的目前最高规格的课程,我们的课程费用其实不算低,但是性价比很高。
参加我们的课程,您就相当于进入了无人机开发的顶级圈子,如今众多无人机企业(也是我们的战略合作伙伴)招员工都开出了2W~4W的月薪。
相对于此来说,我们的课程绝对是物超所值。
具体费用请详询Summer老师。
6、报名方式
联系人:Summer
QQ: 1073811738(summer)
微信: a1073811738(summer)
联系电话:13814838574
邮箱:dxl0725@126.com

联系人: 斯东
微信: 253331754
QQ: 253331754

联系人 : Better
联系微信: wang3413694
联系QQ : 1751300722
联系电话: 18362773781
联系人 : 潇齐
联系微信: brave_mo
联系QQ : 563597309
联系电话: 13913152056
7、往期回顾


8、活动海报
















