首先稍微说明直升机(Helicopter)和旋翼机(Rotorcraft)之间的“区别”。
维基百科的词条中Rotorcraft包含Helicopter,Cyclogyro/Cyclocopter,Autogyro,Gyrodyne,Rotor Kite。但有时会直接称呼直升机型飞行器为Rotorcraft,大多见于外文技术书籍中。
有时又会将旋翼机和直升机完全分开看做不同概念,这样的做法在国内的工程界和学术界中比较普遍。例如国内一般在谈论旋翼机时,特指“自转旋翼飞行器”(Autogyro),但在上面两种国外的分类中,Autogyro只是旋翼机的一个子类。Autogyro飞行器的代表产品如美国GRON公司的猎鹰4型

或者常见的爱好者自制旋翼机:

关于旋翼机的特点、结构、姿态控制等内容MR.城堡会在本系列后面的文章中作为单独专题写出。
今天这篇文章,MR.城堡就只限于下面这类小型直升机型无人机的相关内容。

1.机身结构

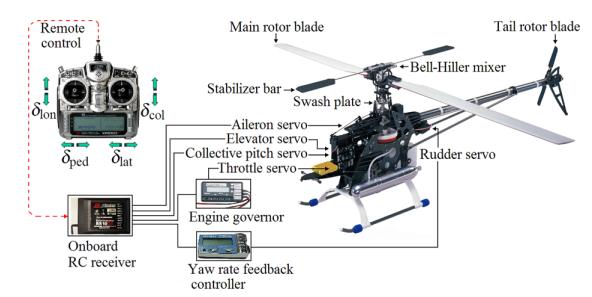
小型RC直升机的组成部分包括:主旋翼,尾桨,垂尾,平尾,Flybar(副翼),主旋翼结构(自动倾斜器,Bell-Hiller结构等),起落架,机身。读者可以比照下面这两款在实际研究项目中使用的直升机型无人机来了解该机型结构。


从上到下分别为HeLion和SheLion无人机。特别强调小型直升机是因为随着飞行器尺寸的变化,气动参数差别很大,在严肃的飞行器设计时会使用Scale ratio这个比值对气动方程中的参数进行调整。
2.动力与姿态控制
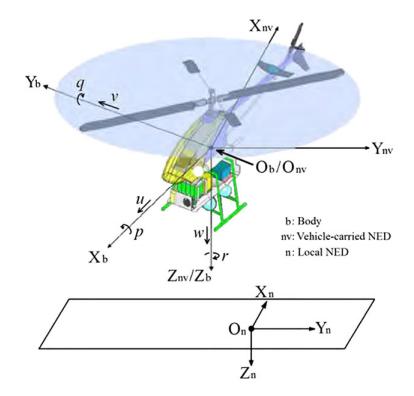
直升机型无人机包括六自由度运动过程:惯性坐标系下三个直线方向,旋转坐标系下三个姿态,俯仰,横滚,偏航(纵向,横向,垂向)。直升机姿态控制力矩来自于主旋翼和尾桨。抛开各姿态中的耦合因素,主旋翼提供俯仰和横滚所需的姿态控制力矩,尾桨提供偏航力矩。直升机型无人机如果将挥舞角看做内部状态则degree=5:平面线性位移(x,y,z),平面线性速度(u,v,w),姿态角(phi,theta,psi),角速度(p,q,r),挥舞角(a,b)。
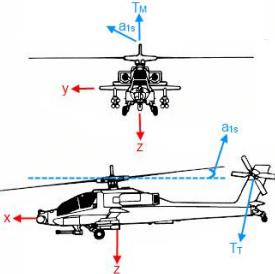
主旋翼提供拉力是很明显的,但是如何将拉力投影到纵向和横向上并产生姿态控制力矩呢?直升机是通过主旋翼挥舞实现的。直升机主旋翼桨尖平面(Tip Path Plane)不是固定在一个二维平面中的,而是上下挥舞,以此平衡直升机主旋翼左右不平衡受力。挥舞产生横纵挥舞角,主旋翼拉力就是通过横纵挥舞角投影在其它方向上,并通过桨毂产生力矩控制直升机姿态。

主旋翼通过自动倾斜器调节周期变距实现挥舞运动。上图为自动倾斜器(十字盘)以及常见的Bell-Hiller系统。通过这样的结构将伺服电机的转动变化为倾斜器角度变化,再控制桨距角发生变化,最终将主旋翼的升力投影在运动方向上驱动直升机实现三个方向上的直线运动。
上图是MR.城堡认为非常漂亮的图片,一张图就将小型RC直升机硬件结构表现的非常清晰。RC直升机用四个伺服电机控制姿态,一个私服电机控制油门。控制姿态的伺服电机中:Aileron,Elevator,Collective(关于接收机接法请参照MR.城堡之前的系列文章:城堡里聊无人机:不同机型飞行原理(一))三个伺服电机和十字盘连接,控制总距,横纵周期变距;Rudder控制尾桨,现在都会连接Yaw rate feedback controller对RC直升机进行“锁尾”。















