为了使移动机器人能自动避障行走,就必须装备测距系统,以使其及时获取距障碍物的距离信息(距离和方向)。本文所介绍的三方向(前、左、右)超声波测距系统,就是为机器人了解其前方、左侧和右侧的
环境而提供一个运动距离信息。
为了研究和利用超声波,人们已经设计和制成了许多超声波发生器。总体上讲,超声波发生器可以分为两大类:一类是用电气方式产生超声波,一类是用机械方式产生超声波。电气方式包括压电型、磁致伸缩型和电动型等;机械方式有加尔统笛、液哨和气流旋笛等。它们所产生的超声波的频率、功率和声波特性各不相同,因而用途也各不相同。目前较为常用的是压电式超声波发生器。
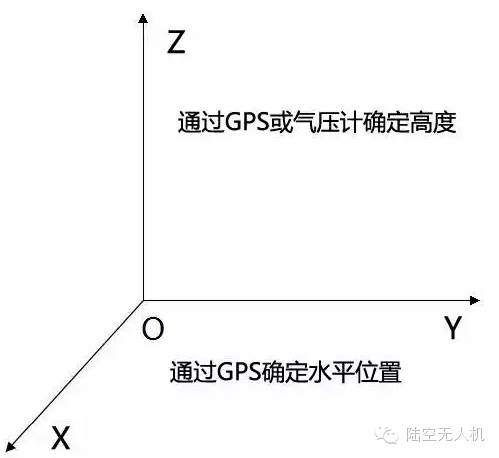
GPS如何定位水平位置和垂直高度?
GPS定位,实际上就是通过四颗已知位置的卫星来确定GPS接收器的位置。
![]()
如上图所示,图中的GPS接收器为当前要确定位置的设备,卫星1、2、3、4为本次定位要用到的四颗卫星:
· Position1、Position2、Position3、Position4分别为四颗卫星的当前位置(空间坐标),已知d1、d2、d3、d4分别为四颗卫星到要定位的GPS接收器的距离
气压计
测量高度原理:
工作原理是将输入信号(压力)转换为电阻变化,即通过惠斯登电桥架构的压阻式压力传感器感应施加在薄隔膜上的压力。压力传感器的一个重要参数是灵敏度,高分辨率的小型压力传感器使得气压计/高度计应用得以在移动终端中实现,比如在导航仪上面,可以通过高度计能够准确判断出位置是在桥上还是桥下——现代电子技术