导读 | 在无人机集群研究领域,仿真验证技术可以高效且低廉的对算法理论,缩短研制周期,降低研制成本。全数字仿真技术和半物理仿真技术是仿真验证技术的两种主要实现方式,本篇带你快速了解无人机集群半物理仿真系统!

仿真验证技术最新综述及半物理仿真验证系统优势
在无人机集群研究领域,仿真验证技术发挥着重要的作用,利用仿真技术可以高效且低廉的对算法理论成果进行测试验证,根据测试结果不断迭代系统方案,极大的缩短研制周期,降低研制成本。其实现方式主要有全数字仿真技术和半物理仿真技术,两种技术在系统研发设计过程中经常需要综合使用,全数字仿真技术应用数字模型,将整个测试仿真过程在虚拟环境中运行完成,不涉及软硬件数据通信交互,主要应用于系统前期的预研及可行性论证等工作。
半物理仿真验证系统可以提高系统的置信度,以真实物理模型为基础,将被仿真系统的一部分以实物方式引入仿真回路,尤其是一部分非线性传感器,可减少虚拟系统与真实设备之间的误差。相较于全数字仿真技术,半物理仿真技术逼真度更高,可以更真实的模拟设备传感器的状态,可以更好的验证系统方案的正确性和可行性,进行故障模式等的仿真以及对各研制阶段验证进行闭路动态试验。
无人机集群半物理仿真系统解决方案
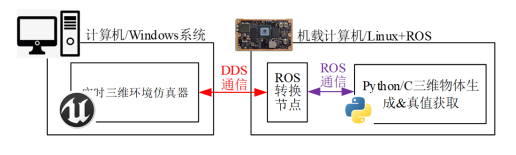
针对无人机集群半物理仿真实现,飞思实验室具备成套解决方案,其系统框架如下图:
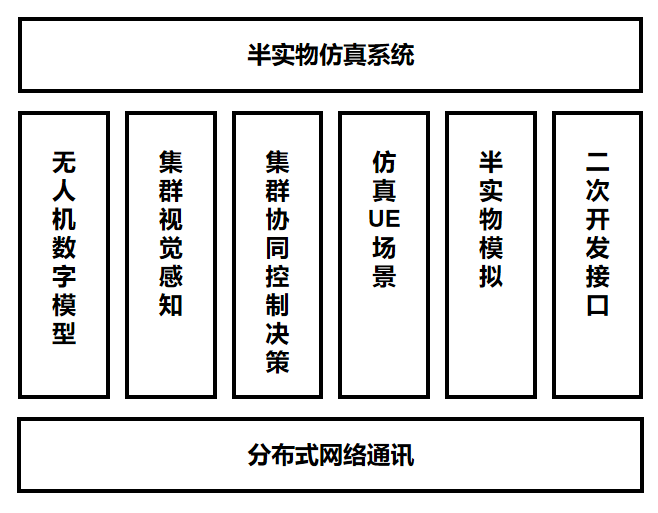
系统各功能模块如下:
01、无人机模型设计模块
系统具备无人载具统一建模框架,将整个无人载具系统分解为两个部分:机身系统与控制系统。机身系统与控制系统之间交互传感器数据与控制信号。而机身系统又可以细分为四个子系统:机体子系统、执行器子系统、三维环境子系统和传感器子系统。
机体子系统
包含了机身、运行环境、力与力矩等内部子系统模块,是对机体在环境的运动、能耗和故障特性的整体描述;
执行器子系统
包含了飞行器与外界环境的相互作用,它接收来之控制系统的控制信号,然后产生的力与力矩来驱动机身运动;
三维环境子系统
主要用于描述无人机飞行的三维视景环境(包括树木、障碍物、公路等),用于为自主控制系统提供视觉数据的模拟。
传感器子系统
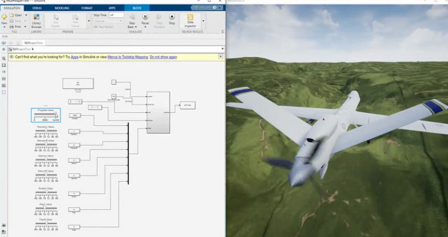
主要用于描述控制软件之外的所有电子硬件模型,主要包含传感器数据、通信协议、连接接口等特性;在整个建模框架中,机身系统需要进行高精度建模,并且在实时仿真计算机中实现,最后连接控制系统软件或硬件,构成软件在环仿真或硬件在环仿真闭环。在整个仿真模型搭建完毕后,可以利用自动代码生成的方法生成不同实时仿真计算机环境下的仿真软件,并且通过替代其中特定的子系统模块可以快速扩展得到不同类型的载具模型。所示为Simulink中搭建仿真模型的示例,它包含了基本的运动仿真功能以及故障注入功能,能够非常逼真地仿真各种多旋翼的运动动态。
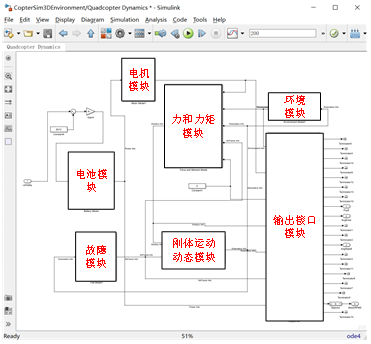
Simulink仿真模型
02、集群视觉感知模块
集群视觉感知模块主要完成无人机的环境感知、视觉处理等功能。其通网络通讯节点接收视觉模块发送的无人机视觉传感器数据,利用图像算法或人工智能完成视觉的导航或态势感知。顶层控制模块通过综合操控人员的指挥信息、无人机的状态信息(姿态、速度、位置、电量、健康程度等)、视觉感知的结果等信息,完成无人机的上层决策,并将底层控制指令发送给无人机自驾仪。
03、集群协同控制决策算法设计模块
集群协同控制决策算法设计模块,具有顶层集群规划指挥层、组网通讯节点层、集群决策层、底层控制层等大规模无人机集群控制系统。
1)支持集中式的无人机集群控制策略,在指挥中心可以获取所有无人机数据并统一进行轨迹规划与安全防护;
2)支持分布式的无人机集群控制策略,每个飞机可获取临近无人机的信息,并进行自主决策;
3)支持集中式控制算法的软/硬件在环仿真验证;
4)支持局域网内多台电脑上的多个软/硬件在环仿真系统组网,形成整体的集群仿真系统,并实现集中显示与控制
5)支持集群控制算法快速移植到真机飞行平台中,进行试飞测试;
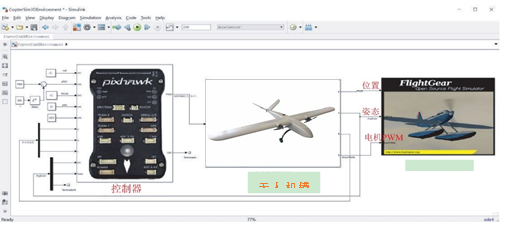
固定翼飞机软件在环控制仿真
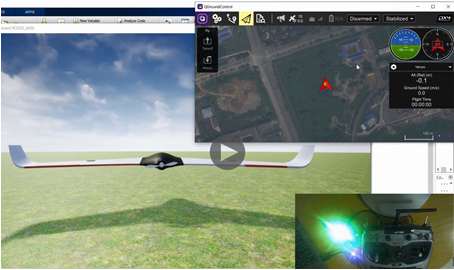
固定翼飞机硬件在环控制仿真
04、典型场景搭建设计模块
本平台基于UE4实时三维渲染引擎开发了面向无人机的实时视景软件RflySim3D,它可以接收局域网内的所有飞机数据并集中实时显示在场景中,同时支持单独配置并获取到特定飞机的特定机载摄像头。此软件也支持自行设计并导入三维场景和飞机模型,且操作非常简单。支持直接使用UE4场景库中的海量三维场景和飞机模型;同时支持用3Ds Max和AutoCAD等软件自行制作三维场景和飞机模型并导入UE4。下图分别展示了平台目前自带的四旋翼室内飞行、小车街区行驶、六旋翼森林穿梭和固定翼山脉巡航的三维场景。

高逼真三维场景示例典型场景搭建设计模块,能够自定义场景类型,提供典型场景模块设计SDK,对场景内的环境、设施及行人进行自定义。支持通过UDP/ROS动态改变场景地图、改变飞机三维样式、动态创建障碍物(其他飞机、跟踪靶标、人物、标定板、桌椅等)、动态改变飞机视角(位置、方向、焦距等)、改变三维引擎输出图像分辨率等。
05、半实物模拟模块
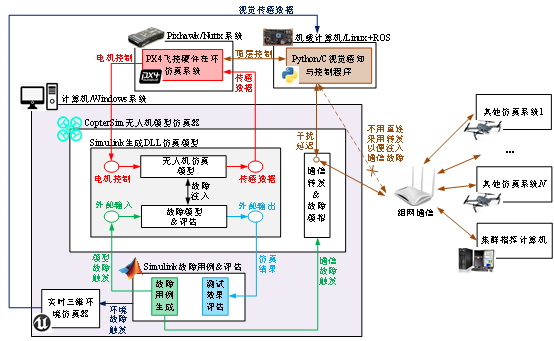
系统支持外部传感器接入,传感器数据分为两类:直连飞控的外部传感器(磁罗盘、差分GPS、光流测速等),另一类是直连机载计算机的视觉传感器(双目、Lidar、深度相机等)飞控传感器通过Simulink等程序直接生成传入Pixhawk飞控,视觉传感器通过三维环境引擎生成,随图像传入机载计算机。

飞控与机载计算机在环半物理仿真
无人系统运动仿真模块接收无人系统飞控的舵机输出信号,采用六自由度动力学模型,解算出某型无人系统飞行运动状态,输出飞机的姿态、位置、速度等状态参数。信号选择模块根据用户的选择将无人系统的状态参数输出到转台或者视景仿真系统。如果输出到转台,转台在转台控制模块的作用下,完成的无人系统飞行姿态的联动和模拟;如果输出到视景仿真系统,则可以在虚拟的三维场景中显示无人系统的运动姿态和运动轨迹。信号选择模块的框图如下图所示:
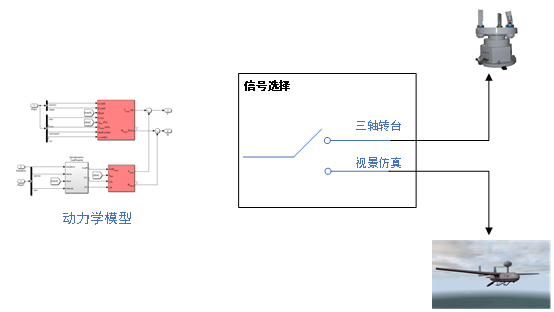
信号选择模块(转台在环半物理仿真)
06、分布式网络通讯模块
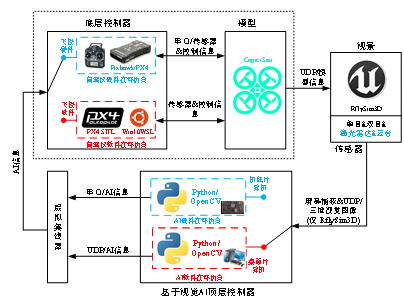
本系统采用分布式组网架构,不同的仿真模型可以运行在同一台电脑或者不同的电脑上。打开多个模型仿真器并连接多个Pixhawk/PX4自驾仪硬件就可以形成多无人机集群的仿真环境。由于单台电脑的性能是有限的,可以通过局域网内多台电脑间进行相互通信的形式进一步扩展整体飞机数量。
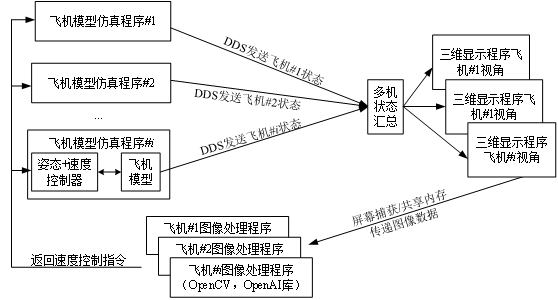
多机视觉处理框架
07、系统二次开发协议接口模块
1)实现对无人机动力学模型、3D仿真模型进行辨识后重新建模,提供接口协议,以便在后续工作中自行构建无人机模型。提供Simulink无人机动力学建模模版,支持多种旋翼类型,便于模型开发与扩展;提供标准输入输出接口,可在Simulink中自行搭建任意构型无人机模型;支持Simulink自动代码生成为DLL文件的形式导入到硬件在环仿真器中;动力系统组件数据库覆盖市面上2000款以上组件产品,支持从数据库中选择合适组件组装不同构型无人机并估算性能与模型参数,用于无人机动力学仿真。2)平台提供系统故障注入接口:模型故障:提供Simulink模型和外部触发接口,可自行加入任意故障。通信故障:所有通信链路经过统一接口转发,可模拟延迟、丢包等。环境故障:障碍物等在三维引擎中生成。
3)平台提供传感器基本参数与安装位置的深度相机传感器模块SDK,用户可以通过设置相关参数对无人机机载视觉传感器进行设计朝向、焦距、视场角等,自定义机载视觉模块;根据用决策的输入输出接口协议,提供决策系统输入/输出接口。















