前言
在自然界中,为弥补个体能力的不足,诸多生物种群能通过个体相互之间的交流与合作呈现出某种群体行为,比如鱼群结群游弋、鸟群聚集迁徙以及蚂蚁协同搬运等。受此激励,人们希望开发像鸟群、鱼群一样自由集结可以执行全局任务的无人机集群系统。近年来,无人机集群因其潜在的巨大应用价值得到快速发展。

飞思实验室无人机集群协同算法开发验证平台
01PART
目前无人机集群成为各国争先研究的热点,不断有集群项目的突破性报道,如最近我国浙江大学团队取得的最新研究成果无人机集群协同穿越竹林。飞思实验室基于无人机集群协同的研究热点和重点,为各研究单位提供了一套完整的无人机集群协同算法开发验证平台,这里介绍基于室外RTK/GPS定位系统下的无人机集群协同。平台架构如图所示:
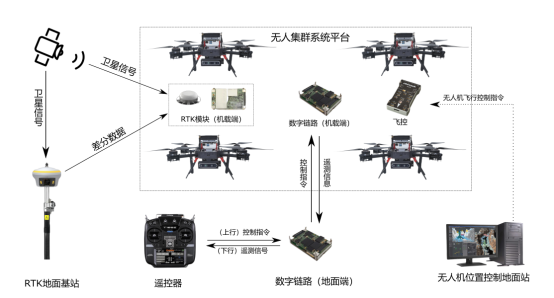
飞思实验室基于室外RTK/GPS定位系统下的无人机集群协同算法开发验证平台由高精度室外定位系统、高性能集群无人机、集群控制数据链、无人机编队协同控制系统四部分组成。
01 高精度室外定位系统
高精度室外定位系统采用RTK载波相位差分定位技术,它能够实时地提供集群无人机在指定坐标系中的三维定位结果,并达到厘米级精度,向无人机提供精准定位信息。
02 高性能集群无人机
高性能集群无人机是飞思实验室专为无人机群飞行、多智能体协同研制的智能集群无人机,使用高强度碳纤维和3D打印技术相结合设计制造。载重大,飞行时间长。内部采用激光定高,性能优秀,飞行稳定,使用简单,一键起降。主要应用于室外无人机集群、slam导航、视觉跟随、目标识别、人工智能应用等领域。
03 集群控制数据链
集群控制数据链有图传、数传、图数一体数据链、WIFI自组网数据链等多种类型,可以满足研究单位对带宽、通信距离、组网方式的不同需求,实现集群无人机机间和空地通信,实现多无人机集群编队和协同的信息交互。
04 无人机编队协同控制系统
无人机编队协同控制系统由飞思实验室针对无人机集群协同控制单独开发的基于MATLAB/Simulink进行集群控制算法开发、多无人机协同算法开发的控制系统,包含无人机集群控制开发环境、无人机集群定位系统接口软件、无人机集群控制接口软件、编队飞行控制软件4个部分。
无人机编队协同控制系统通过Matlab/simulink与ROS环境的算法开发环境,支持多无人机集群控制算法开发与调试,提供完善的代码编辑、运行调试等功能。基于ROS标准开发,通过集群数据链接收定位系统发送的无人机的六自由度位姿信息,转换为无人机定位所需要的格式(欧拉角/四元数转换,坐标系转换),支持Matlab调用。通过集群数据链接收无人机的姿态及状态数据,转换成ROS主题消息,供ROS节点程序使用。无人机控制接口软件可接收ROS节点发布的控制指令信息(支持位置控制指令、速度控制指令、航向控制指令),转换成Mavlink消息发送给无人机。飞行控制软件基于Matlab/Simulink开发,软件分别运行在无人机飞控、与地面控制端平台实现多无人机的集群控制。能获取各无人机的位姿,发送控制指令实现无人机编队协同。可实现多无人机集群顺序编队圆周编队飞行,多无人机集群顺序编队立体“8”字编队飞行,多无人机集群顺序编队主从跟随,多无人机集群“△”编队飞行,多无人机集群“△-□-○”队形变换。
总结
02PAST
室外RTK/GPS定位系统下的无人机集群协同算法开发验证平台主要应用于室外无人机集群技术验证、多智能体协同等方向,平台接口丰富、开放性强,用户不需要掌握太多的底层编程技术即可完成算法的修改和验证。编队软件提供源码,支持 C、C++、Python、ROS、Matlab/Simulink 等多种编程环境,提供完善的二次开发接口。具有系统稳定性高、真实环境测试、抗干扰能力强、飞行范围大等优点。
主要功能如下:
1. 具有精准且实时的无人机集群定位功能;
2. 具有记录无人机集群运动轨迹能力;
3. 具有实时解算六自由度位姿功能;
4. 具有无人机集群协同控制能力;
5. 具有无人机集群协同运动规划能力;
6. 具有无人机集群协同控制二次开发接口;
7. 具有无人机集群控制与协同控制代码完全开源,支持算法修改能力;
8. 具有完整的实验辅助资料以及示例算法代码;
9. 无人机集群协同控制实例包含:
① 无人机集群协同顺序编队圆周飞行;
② 无人机集群协同顺序编队主从跟随;
③ 多无人机集群“△”编队飞行
④ 多无人机集群“△”编队飞行
案例
03PART
飞思实验室无人机集群协同算法开发验证平台,基于室外RTK/GPS定位系统下的无人机集群协同效果图如下:

平台已在以下院校得到成功应用,具体可参考以下应用实例:















