纪尧姆·德莱平
据无人机网(https://www.youuav.com/)发现,自从去年夏天宣布Skydio 3D Scan以来, Skydio 飞行员一直在用Skydio 3D Scan做一些令人惊奇的事情 。从公用事业资产到桥梁,再到历史遗迹,配备自主无人机的飞行员正在完成他们从未意识到的工作。我们 Skydio 很高兴能够进入该领域并与尽可能多的飞行员接触,以了解产品的真正影响,并知道下一步该往何处去。今天,我们宣布推出该产品的第一个主要功能:2D GPS Capture。此自上而下的任务规划器在最新的软件更新中可供现有 3D 扫描客户使用,并将在 3D 扫描设置的“选择扫描模式”阶段提供。
2D GPS CAPTURE 增强企业工作流程
感谢 Skydio Autonomy,我们采用 2D GPS Capture 为所有经验水平的飞行员带来优势。
客户告诉我们,并非每项工作都需要详细的 3D 模型作为输出。有时,2D 拼接或正射镶嵌图像是所需的输出。对于这些输出,3D Capture 飞行实际上比简化的新 2D Capture 工作流程效率低。这种类型的输出通常用于犯罪和事故现场重建、道路检查、房地产,甚至搜索和救援绘图等用例。
2D GPS Capture 适用于任何经验水平。 如果您可以使用汽车中的地图应用程序设置驾驶指令,那么您就具备在 3D 扫描上成功使用 2D GPS Capture 所需的技术专长。基于地图的界面让您可以在无人机在地面时使用触摸屏计划任务——节省电池用于数据捕获,而不是在设置时使用。起飞后,无人机会完成所有工作,甚至可以在您监控场景的同时避开障碍物。

自治使工作更快、更安全。其他无人机可以盲目地跟随航点来让自己通过 2D 扫描,但 Skydio Autonomy 中的无缝避障和路径规划减轻了预先规划的负担。经验丰富的 2D 扫描仪习惯于 MOCA 的概念——最小障碍清除高度,他们必须设置割草机式飞行模式的高度,以避免在脚本飞行期间坠毁他们的无人机。他们可以忘记这一点,因为 Skydio 3D Scan 中的 2D Capture 会让他们飞得更低,他们有信心在无人机注意自身安全的同时获得近距离数据。使用 DroneDeploy 集成的 Skydio 客户已经从这种功能中受益有一段时间了。
利用无缝工作流程的 2D GPS CAPTURE
2D GPS Capture 遵循与 3D 扫描类似的 3 步过程,但一些显着优势使设置 2D 扫描变得更加容易。使用基于 GPS 的简单界面设置您的扫描。2D GPS Capture 允许飞行员使用触摸屏界面在地面上的无人机设置扫描区域,而不是像 3D Capture 那样在场景中飞行。
一旦指定了扫描区域,操作员就可以指定他们需要的重叠量。运营商还可以决定是单向飞行还是交叉影线安排。为了优化扫描区域边缘的数据,操作员还可以选择执行周边飞行。
监控飞行中的无人机。当无人机飞行时,您根据其捕获计划监控无人机的进度。如果需要,无人机将飞回其发射点,这样您就可以更换电池并重新启动,此时无人机将从停止的地方继续飞行。

当场查看结果或导出到第三方软件。您收集的数据是一个充满图像的文件夹。但是,这可能很难在移动设备上导航,因此很难知道您在现场拥有哪些数据。3D 扫描的 边缘模型查看器也 适用于 2D 扫描,因此您可以根据空间索引浏览图像。只需点击您想要查看的扫描区域部分,无人机就会向您展示包含该点的照片。
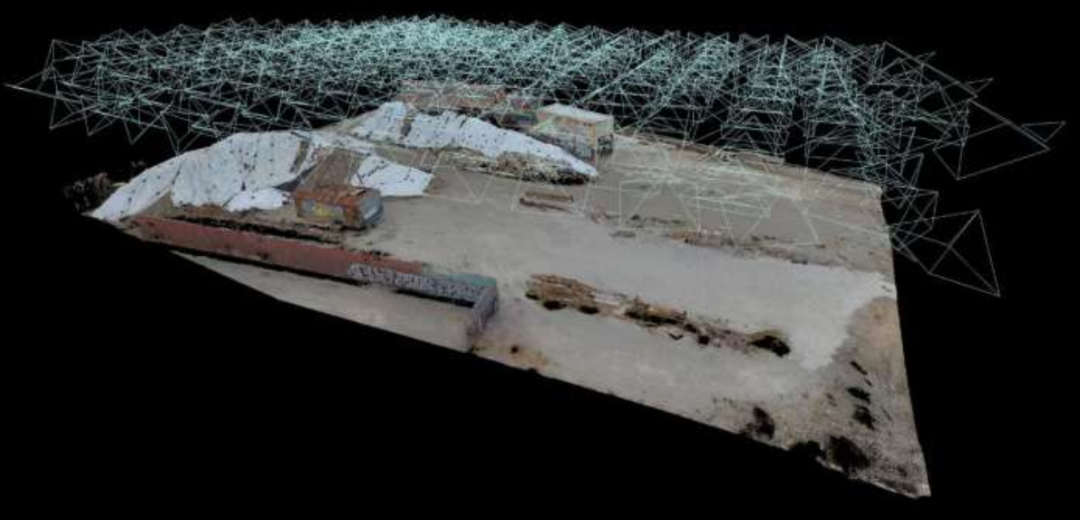
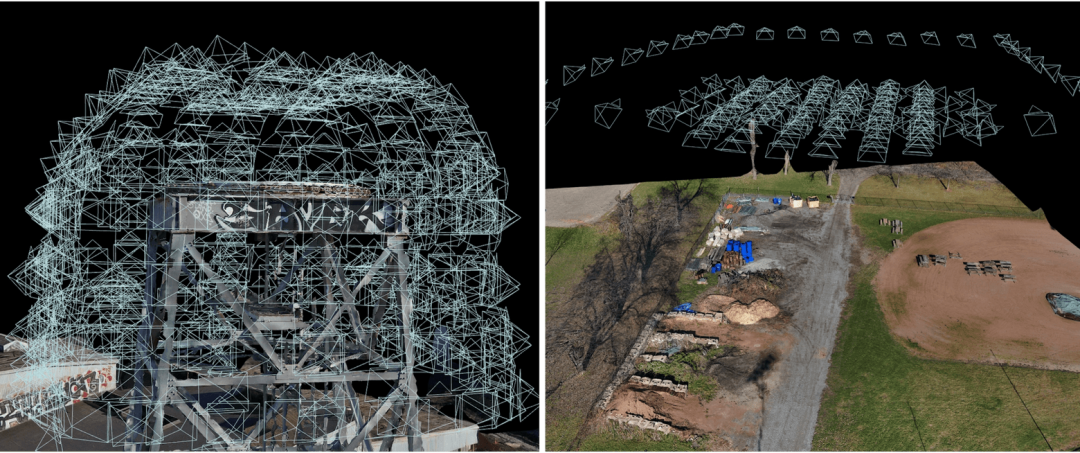
然后可以将数据上传到第三方摄影测量软件,如 DroneDeploy、Bentley ContextCapture、RealityCapture 等。2D GPS Capture 数据集对于生成 2D 正射镶嵌或拼接图像最有用。这些缝合的正射马赛克有助于在平坦区域上进行测量。此 3D 视图显示了 2D 扫描任务拍摄的摄像机角度。
Skydio是一家总部位于加利福尼亚州的初创公司,该公司生产的无人机可以完全自行飞行和拍摄4K视频素材,今天宣布其入门设备Skydio R1现在向第三方应用程序开发人员开放。Skydio Autonomy Platform被公司称为开发人员工具集,它将使应用程序制造商和无人机发烧友能够开发自定义软件,以利用该设备所拥有的大量摄像头和传感器以及其先进的计算机视觉软件和机器学习算法。
该公司独特的计算机视觉和运动计划算法,再加上移动电话中相同的廉价图像传感器和处理器,使无人机能够根据周围环境进行智能导航。这将为新兴的无人机市场带来可用性,可靠性和功能方面的巨大变化,从而使现有的应用程序可以扩展规模,同时可以打开许多新的应用程序。
作为这项工作的一部分,该公司主要提供了两个软件开发套件:一个是Skills SDK,另一个是iOS和Android移动SDK对。首先,开发人员可以访问Skydio R1的“自治引擎”,该引擎基本上是软件和硬件的混合物,可让无人机了解物体并感知周围环境,在操纵环境时避开障碍物,并遵循从无人机接收到的命令。随播移动应用。另一个SDK可让开发人员制作可控制无人机和开发人员正在使用的任何自定义技能的移动应用。
由于R1拥有13个机载摄像头以及深度和运动传感器,因此它能够获取有关其环境的数据,实时绘制该环境的地图并在整个世界中移动,同时避开障碍物并跟踪要拍摄的对象。
所有这些都是通过专有的视觉算法通过Skydio使用人工智能培训技术创造出来的,特别是机器学习和深度学习的多样性,这些技术支撑了硅谷在过去五年中在对象和图像识别方面的许多进步。(Skydio的联合创始人曾是Google无人机交付计划Project Wing的早期成员,都在麻省理工学院研究并帮助创建了自动飞行系统,重点是计算机视觉。)
















